MCB pinout
MCB uses a standard SPI interface with additional GPIO lines:
SCLK: Serial Clock (from Master to Slave).
MOSI: Master Output Slave Input (from Master to Slave).
MISO: Master Input Slave Output (from Slave to Master).
SS: Slave Select (Active low).
IRQ: Interrupt Request (from Slave to Master) - Used to notify when outputs are ready to be read by the Master.
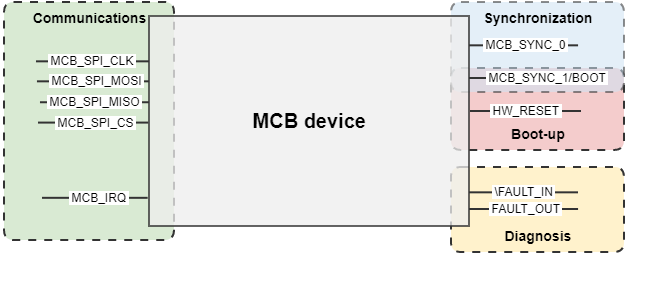
Signals description
Signal | Default state after power on | Direction (from device/slave point of view) | Recommended connection | Description |
|---|---|---|---|---|
MCB_SPI_CLK | - | Input | - | Clock signal of the SPI bus |
MCB_SPI_MOSI | - | Input | - | Master Out Slave In signal of the SPI bus |
MCB_SPI_MISO | - | Output | - | Master In Slave Out signal of the SPI bus |
\MCB_SPI_CS | - | Input | - | Chip Select signal of the SPI BUS |
MCB_IRQ | HIGH | Output | Pull down | Indicates when the device is ready to execute a new SPI transfer |
SYNC0 | LOW | Input | Pull down | Synchronize the internal control loops and PWM generation with an external signal used as a time reference |
MCB_SYNC1/ \BOOT | LOW | Output / Input | - | During boot up, it is used to choose between entering in boot or application mode. After boot up, on application mode, it generates a continuous pulse with the base time of the internal control loops. |
\HW_RESET | HIGH | Input | Pull up | (Active low) It is used to reset the device |
\FAULT_IN | - | Input | - | It is used to force a fault condition into the device from an external event. Active low. LOW = FAULT. HIGH = No fault. Also named EXT_FAULT |
FAULT_OUT | - | Output | - | (Optional) It is used to indicate if an internal fault condition is active on the device. This pin is typically tied to a red signaling LED. |
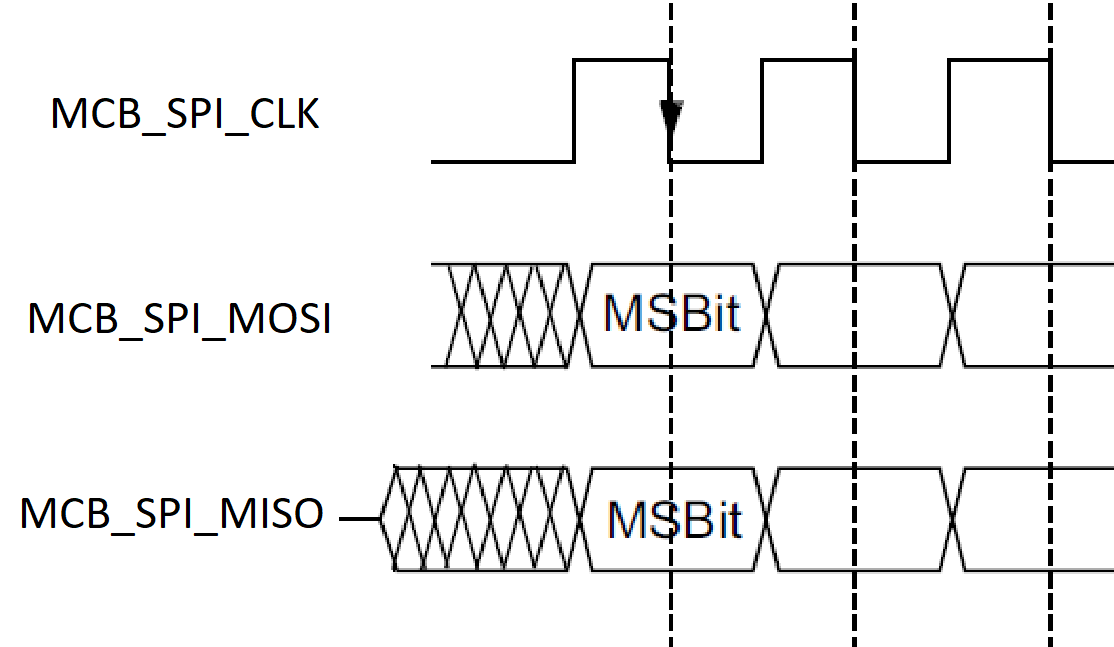
Communication format
SPI offers up to four timing relationships using different clock polarity and clock phase configurations, MCB SPI peripheral is configured with clock polarity high and the sampling is done in the first edge. The SPI transmits data one half-cycle ahead of the falling edge of the MCB_SPI_CLK signal and receives data on the falling edge of the MCB_SPI_CLK signal.