Command Sources
Command sources are mechanisms available to the user for setting the desired target value for a certain magnitude (position, velocity, torque, etc) that the driver is requested to reach. This information about the desired target value can be encoded in a multitude of ways: from a direct value request from the communication interface or a pulse count to an analog signal, a PWM signal or even the output of a quadrature incremental encoder. EMCL is able to handle all of those kinds of inputs to provide maximum flexibility and performance of the control system.
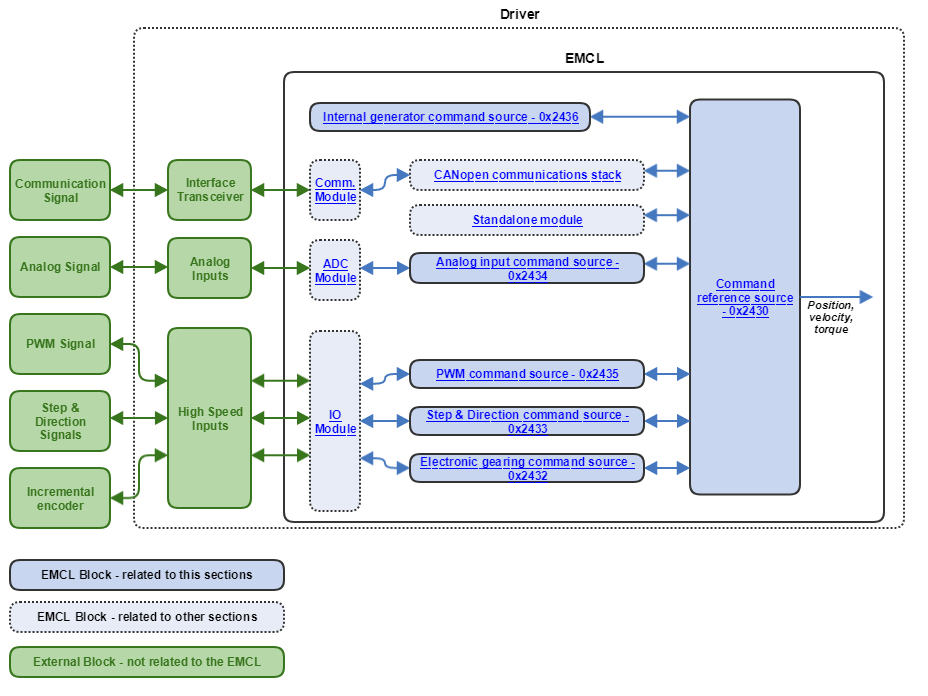
EMCL accepts 6 direct command sources: network data, analog input, PWM input, step & direction signals, incremental encoder direct following, and the internal signal generator. In addition, the stand-alone module can be used to provide target data to the system without the need for master inputs.
The next picture shows a graphical representation of the available command sources in the EMCL: