What is EMCL?
EMCL is short for Embedded Motion Control Library and it is a firmware designed to manage all functions related to motion control and communication of a motion controller system. This is the firmware included in Ingenia's Base servo drives family.
If you are using a SUMMIT SERIES drive (Everest, Capitan, or Denali), please check the following Command Reference Manual
What is motion control?
Motion control is a sub-field of automation, in which the position, velocity or torque of machines are controlled using some kind of actuator, generally a servo drive. The schematic of a typical motion control application is shown in the following diagram:
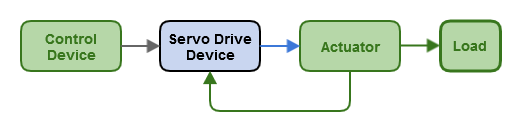
Machines using a motion control architecture include the following elements, all of which have a decisive influence on the performance of the system:
Control device: determines the general behavior of the system, and handles the control commands to be fed to the servo drive device.
Servo drive device: also known as amplifier, receives the control commands from the control device and adapts its behavior according to this commands and the input signals from sensors.
Actuator: provides the load with mechanical energy with the required speed and torque to drive in the specified way. It also includes mechanical power transmission components - belts, gear-boxes, clutches, ballscrews, etc. - encountered before the load.
Load: receives the mechanical energy from the actuator.
What is a servo drive?
A servo drive controller is an electronic device that is designed to control the movement of an electric motor accurately and efficiently. For example, a motion controller may be used to ensure that, when a motor reaches its target position, it stays quiet in this position without oscillating around it. It also could be used to ensure that the motor does not exceed a certain acceleration threshold, to avoid excessive wear or even damage in the mechanics.
Some controllers include the power amplifier necessary to generate the suitable current to drive the motor (drive-electronics). All of Ingenia's controllers include it, although this feature cannot be taken for granted when choosing a generic servo drive.
EMCL functional block diagram
The following diagram shows the functional hardware and software blocks (HW and SW) that compose a motor controller based on emcl.
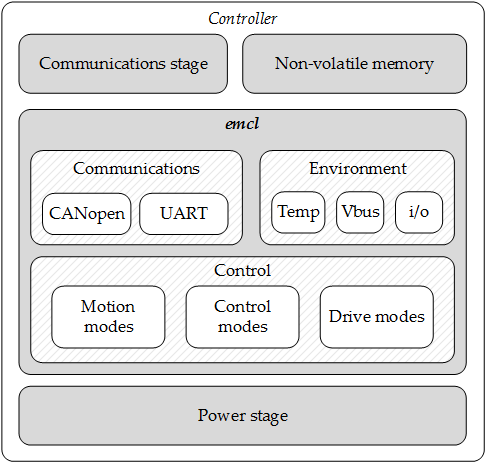
Functional Block Diagram
The power stage is in charge of converting the low level signals generated by emcl to higher voltage signals used to drive the motor. In the same way, the communications stage is in charge of adapting voltage levels between CAN or RS232 protocol and the input of emcl.