EtherCAT FoE bootloader (EVE-NET-E)
EtherCAT summit devices include the File over EtherCAT (FoE) mailbox which allows updating the firmware of summit devices.
Follow the next steps to update a summit device:
1.Open Twincat, create a new project and scan the network to discover the summit device.
Copy the available ESI file of the downloaded firmware package into TwinCAT\3.1\Config\Io\EtherCAT folder before opening TwinCAT.
2.Open the online tab and set the drive into the bootstrap state. The RUN LED will be blinking green and fast.
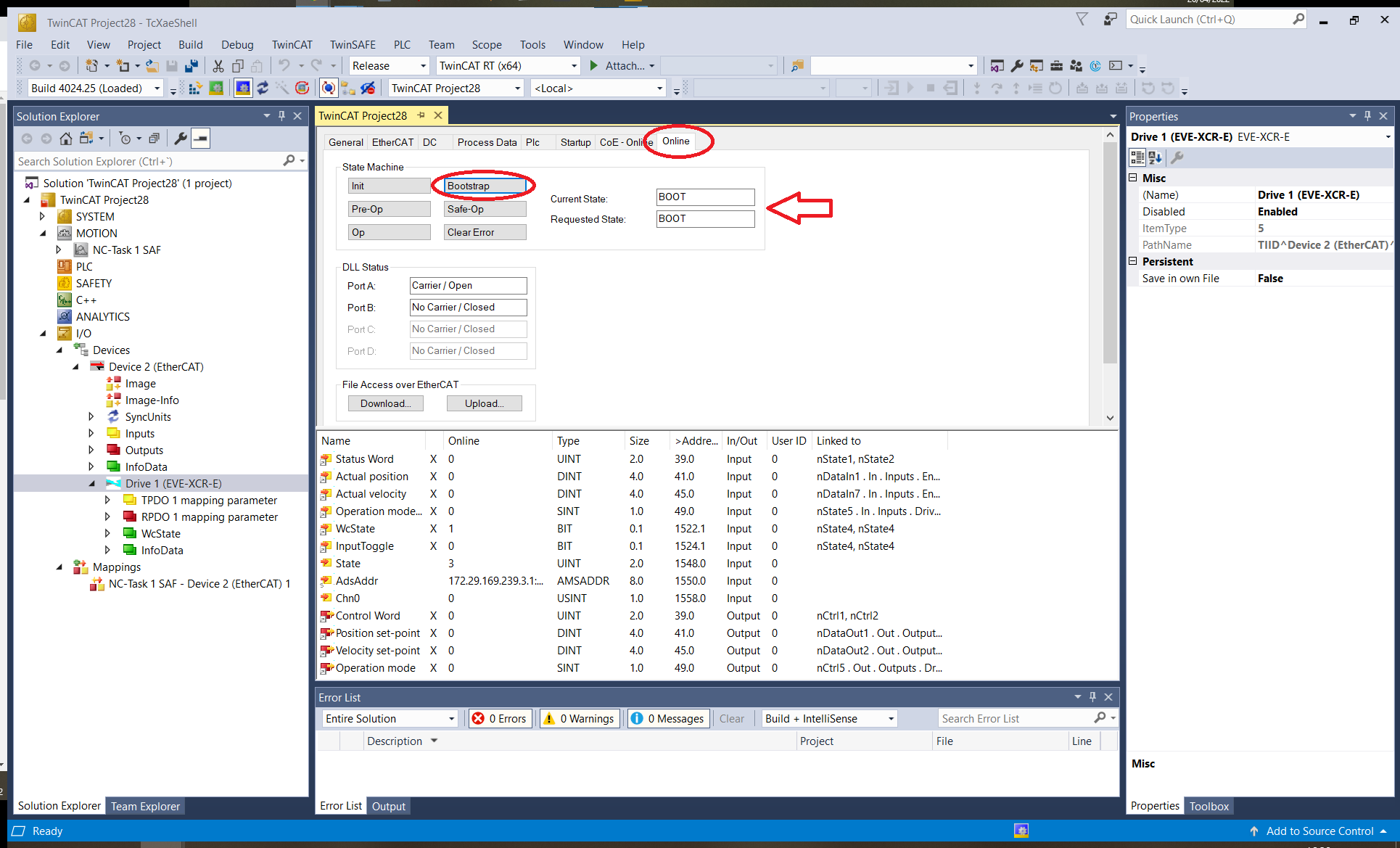
3. Now the device is in FoE bootloader mode.
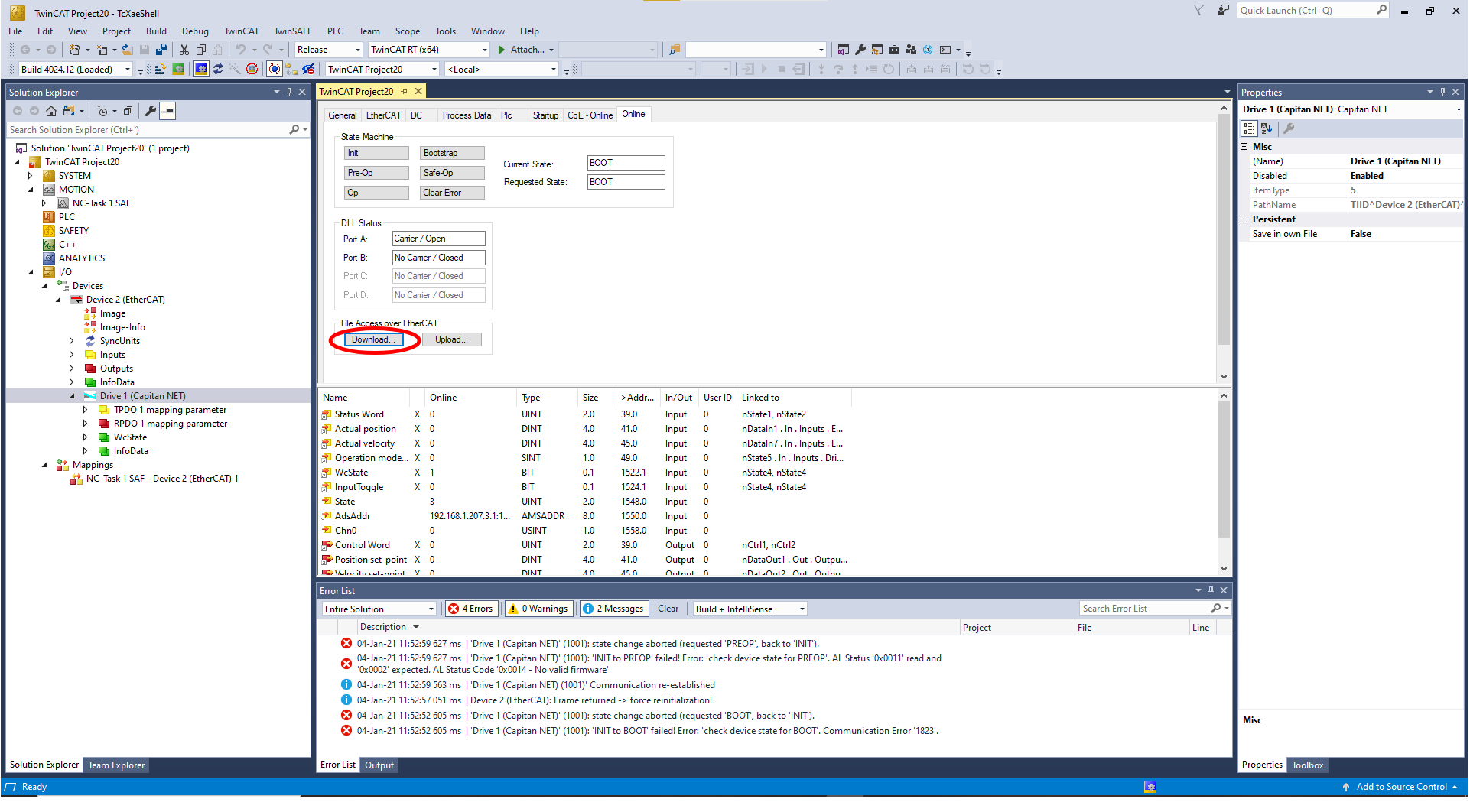
Click on the Download button, and look for the appropriate firmware file. Click on all files option to be able to see the file.
Firmware files
You will need an .sfu firmware file to complete this step. The drive is not compatible with an .lfu file.
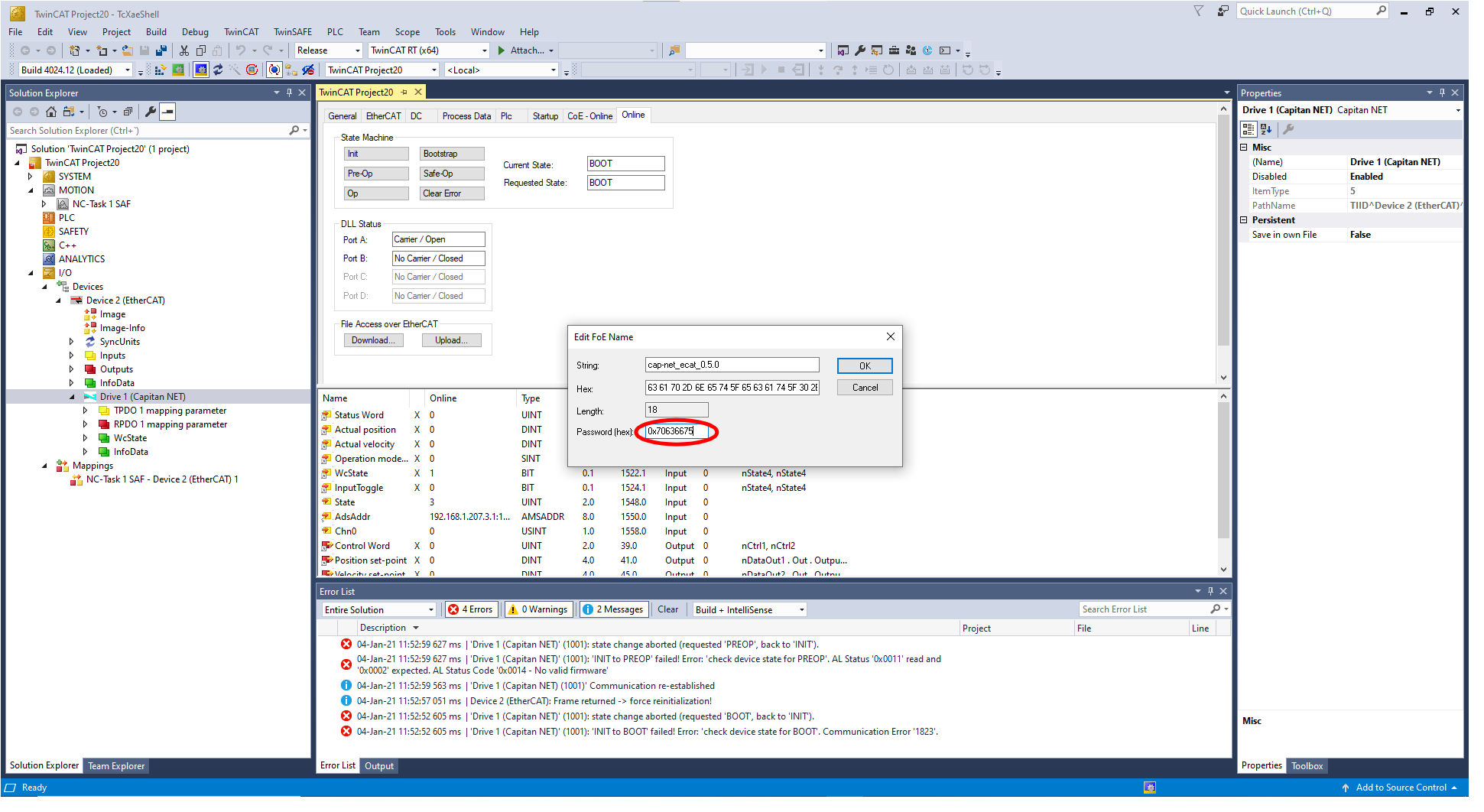
4.Write the password 0x70636675, and finally click on OK button.
5.A downloading message will appear on the bottom progress bar. Wait until the message changes to ready.
6.Come back to the INIT state. Then the drive will finish the updating process and it will restart.
Wait until a message of communication re-initialization appears on the TwinCAT log.
After a firmware update, it is necessary to follow a special procedure before using the drive:
Connect with MotionLab3
Restore the drive to defaults (File → Drive 1 → Restore all).
Power-cycle the drive.
If the firmware update fails, re-try the process.
In case, recover of the drive is required, follow the procedure here: How to recover the drive after a failed firmware update .