1.3.1
This version adds new storable registers from the previous releases. If your drive has a configuration in the non-volatile memory, this new registers will be loaded with unknown values. Follow the next steps to fix it:
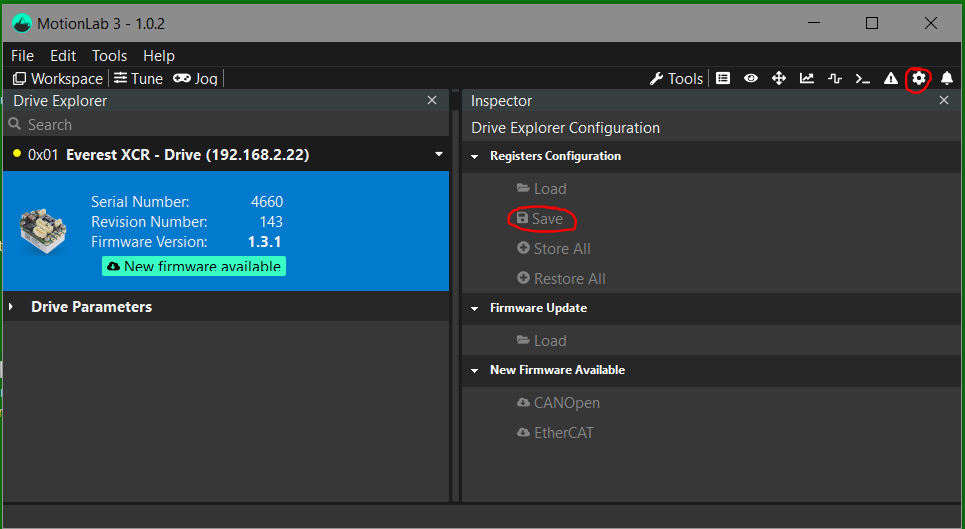
- Save your configuration using MotionLab3
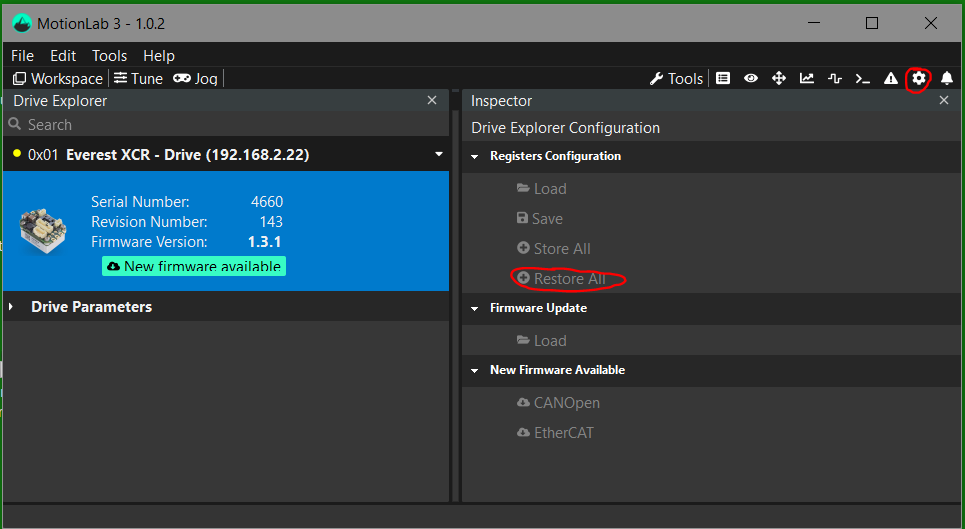
- Restore defaults configuration
- Power cycle the board
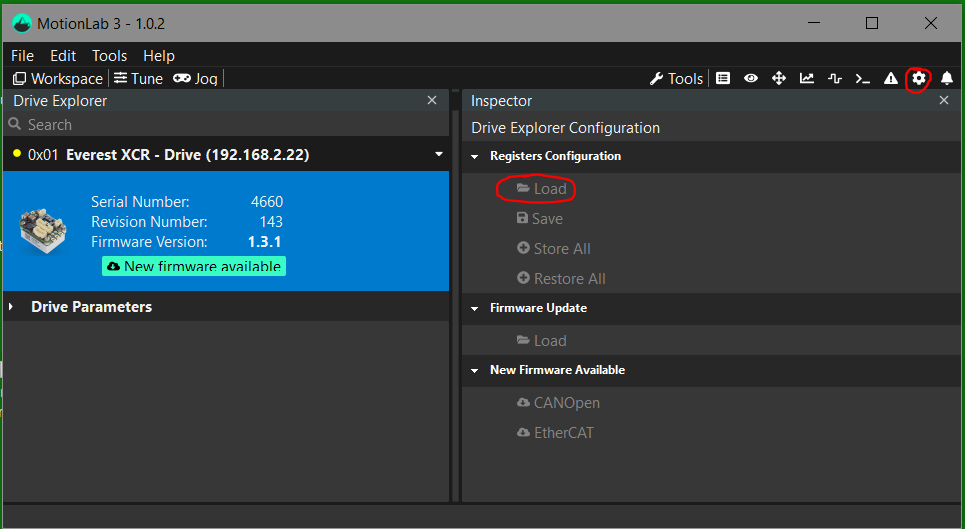
- Load your configuration
New Feature
- [SUMMIT-1692] - Add all related CSC registers into CANopen release
- [SUMMIT-668] - As a user I would like to be able control the brake using two different outputs voltage (activation & holding)
- [SUMMIT-1337] - As a user I would like to control direct & quadrature current components when working in CSC mode
- [SUMMIT-792] - Add motor current register.
- [SUMMIT-1641] - Synchronize motion control loops using external input Sync 0.
- [SUMMIT-1647] - Add Health functionality into IO.
- [SUMMIT-1457] - First capture of monitoring is done before the specified trigger delay.
- [SUMMIT-1458] - Add falling edge as trigger start condition for monitoring.
- [SUMMIT-476] - CANopen configuration (Node Id and baudrate) must be storable in the NVM through LSS protocol.
- [SUMMIT-515] - Add position range limits for endless positioning systems.
- [SUMMIT-1037] - Add Sync 1 synchronisation in the master MCB side
Improvement
- [SUMMIT-1659] - Add a register to read current loop frequency and add registers to access to voltage commands
- [SUMMIT-1663] - Decrease EtherCAT latency (from 5 cycles to 2-3)
- [SUMMIT-1347] - Allow to modify the baudrate for absolute encoder interfaces.
- [SUMMIT-1666] - Software position limits must be PDO mappable (EtherCAT).
- [SUMMIT-1256] - Fix errors and warnings detected by EtherCAT Conformance Test Tool.
- [SUMMIT-359] - Parameters range limited to drive capabilities.
- [SUMMIT-1673] - Force I2T fault reaction when internal I2T is triggered even if current loop is enabled.
- [SUMMIT-1124] - Add more options for Motor temperature sensors
Bug
- [SUMMIT-1660] - Wrong drive behavior if SYNC0 signal is enabled
- [SUMMIT-1661] - SDO complete access is not working
- [SUMMIT-1480] - Forced alignment method stops some feedbacks after phasing execution.
- [SUMMIT-1490] - First cyclic message (MCB) contains 0 instead of data from motion core.
- [SUMMIT-1642] - CANopen version does not respond anymore through Ethernet connection after connecting 2 or 3 times.
- [SUMMIT-1669] - Communications are locked if a disturbance signal is injected without monitoring feature enabled.
- [SUMMIT-1677] - CANopen is stuck randomly after some time.
- [SUMMIT-1680] - FoE process is not executed properly and the drive remains stuck after firmware update.
- [SUMMIT-1696] - On velocity mode, velocity readings (with digital encoder) and control cant be done until 20 seconds later
Known issues
| ID | Description | Workaround |
|---|---|---|
First forced alignment with halls after having done another forced alignment with another feedback, fails | If forced alignment result is not a multiple of 0.166666 (including 0.0 and 1.0), change commutation feedback to internal generator, then change commutation feedback back to digital halls and perform phasing again. | |
| SUMMIT-1683 | Position range limits is failing around 0. | None. |
Secondary SSI baudrate 100 kHz does not work. | Use 200 kHz. |