1.5.1
If your drive version is older than 1.5.0, use Motionlab 3 (1.3.0 version or higher) FTP bootloader tool to update it.
Using older Motionlab version will lock the drive permanently in bootloader state
This version adds new storable registers from the previous releases. If your drive has a configuration in the non-volatile memory, this new registers will be loaded with unknown values. Follow the next steps to fix it:
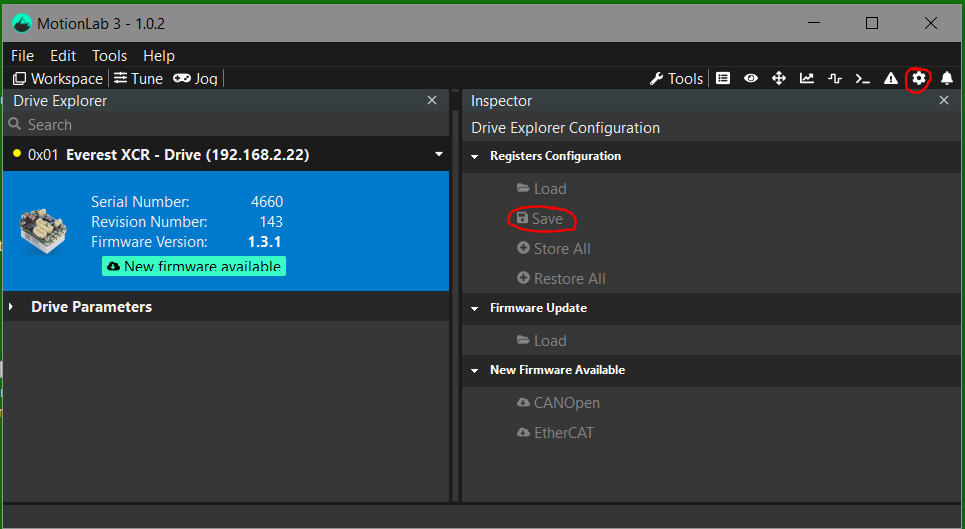
- Save your configuration using MotionLab3
- Restore defaults configuration
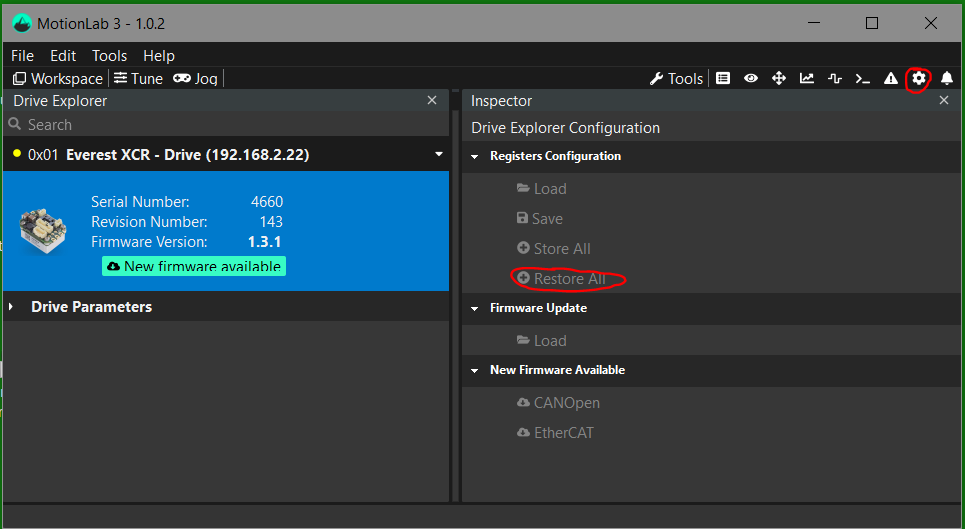
- Power cycle the board
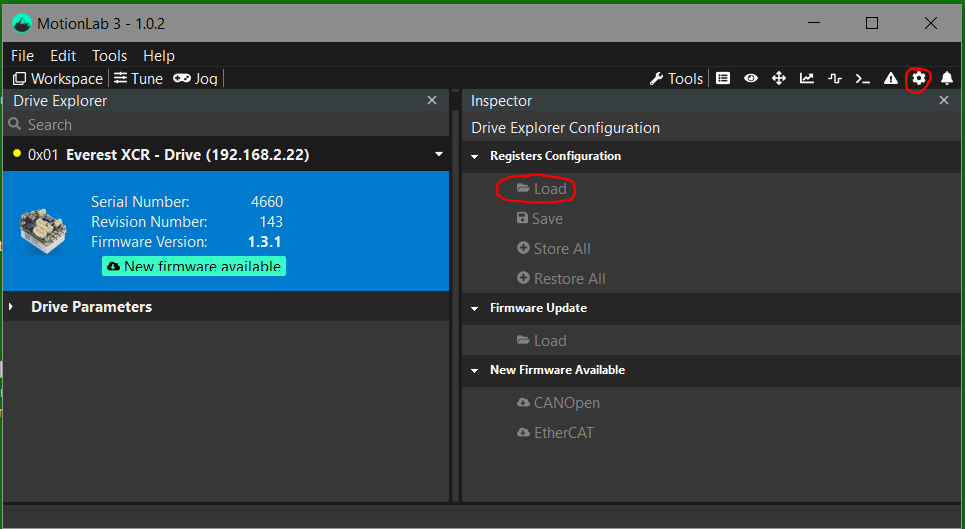
- Load your configuration
Bug
- [SUMMIT-1907] - BLDC commutation does not turn off the inactive phase
- [SUMMIT-1982] - Profile velocity doesn't work properly through CiA402
- [SUMMIT-1992] - Change range of phase voltage readings to correct values
- [SUMMIT-2007] - Some CANopen subindex0 registers have incorrect access type
- [SUMMIT-2010] - CANopen default NodeID must be 32
New Feature
- [SUMMIT-1944] - Add register 0x6078 from CiA402 profile
- [SUMMIT-1996] - When changing operation mode, initialize PID states to match the current physical state
- [SUMMIT-1997] - Initializing the internal PID state upon PID tuning changes to match the controller’s current output
- [SUMMIT-1999] - As a user, I would like to be able of hardwiring the CAN node ID
Improvement
- [SUMMIT-1994] - Operation mode and profilers must be changed on the same cycle
- [SUMMIT-2001] - Apply adjusted derating values
Known issues
ID | Description | Workaround |
|---|---|---|
CANopen subindex0 registers name have the same name of the whole object in EDS. | This does not affect to correct behaviour. | |
CANopen PDO mapping objects are bigger than 8 subindexs and 0x1A03 is missing in EDS. | ||
When forcing a fault in velocity mode and enabling motor, existent set-point is not applied automatically, with automatic latching setting. | ||
Profile velocity doesn't auto-latch when changing operation mode dynamically. |