Pinout
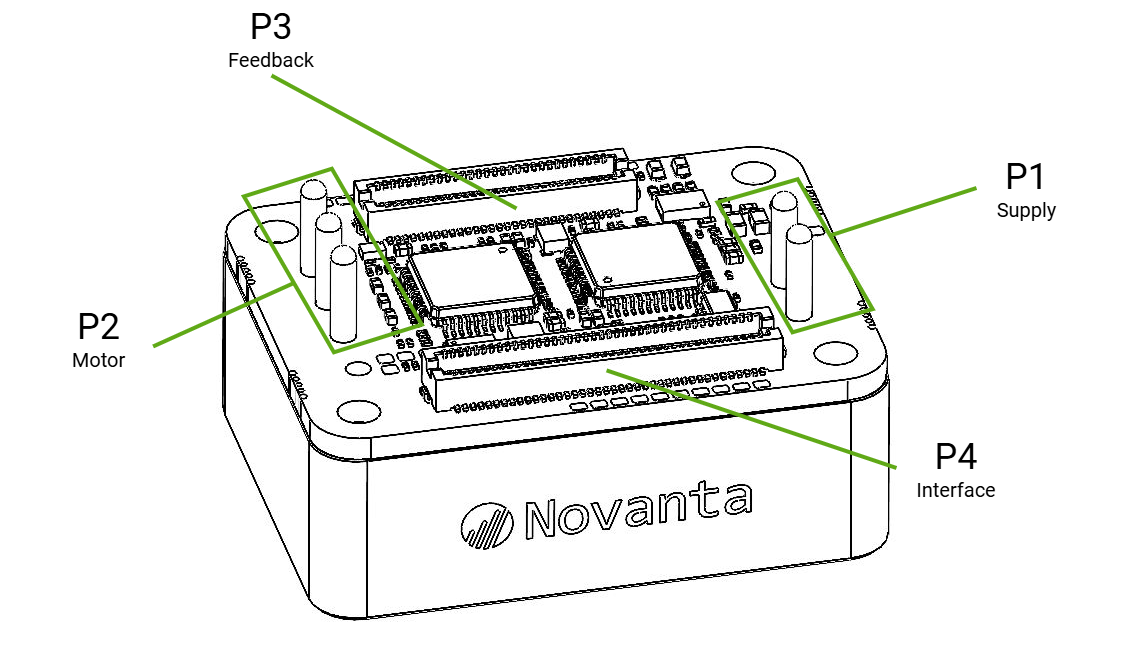
Connectors Overview
P1 and P2 Power pins
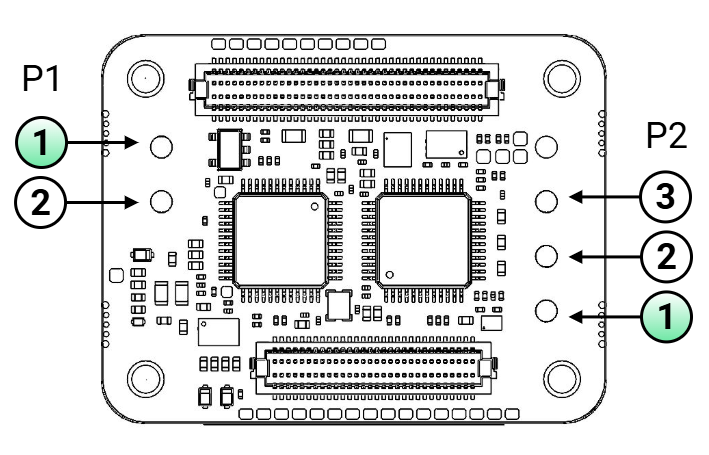
P1 Supply Power pins | |||
|---|---|---|---|
Pin | Name | Type | Function |
1 | POW_SUP | Power | Power supply positive (DC bus). |
2 | GND_P | Power supply negative (Power Ground). | |
Chassis | PE | Protective Earth connected to driver housing and fixing M2.5 threads. | |
P2 Motor Power pins | |||
|---|---|---|---|
Pin | Name | Type | Function |
1 | PH_A | Power | Motor phase A for 3-phase motors, positive for DC motors. |
2 | PH_B | Motor phase B for 3-phase motors, negative for DC motors. | |
3 | PH_C | Motor phase C for 3-phase motors (do not connect for DC motors). | |
Chassis | PE | Protective Earth connected to driver housing and fixing M2.5 threads. | |
Everest S NET power pins | Recommended mating contact | Description |
|---|---|---|
Up to 11.2 ARMS rated motors | ||
Ø 1.52 mm, 4 mm pitch, gold plated power pins. |  | Beryllium copper TH pin receptacle. Gold plated. PCB hole 2.549 mm. Maximum current 11.2 A. |
Mill-Max 9801-0-15-15-23-27-10-0 | ||
> 11.2 A rated motors | ||
Direct solder to PCB. TH pad with min. hole Ø 1.63 mm. Ensure PCB tracks are wide enough to withstand the target current. | ||
Chassis (aluminum body) | ||
3 mm board-to-board height spacers. |  | Surface-mount tinned steel round spacer, Ø 2.7 mm internal, Ø 5.1 mm external, 3 mm board-to-board height. |
Wurth Electronics 9774030951R | ||
 | Unattached nickel-plated brass round spacer, Ø 2.6 mm internal, Ø 4.5 mm external, 3 mm board-to-board height. | |
Ettinger 05.52.033 | ||
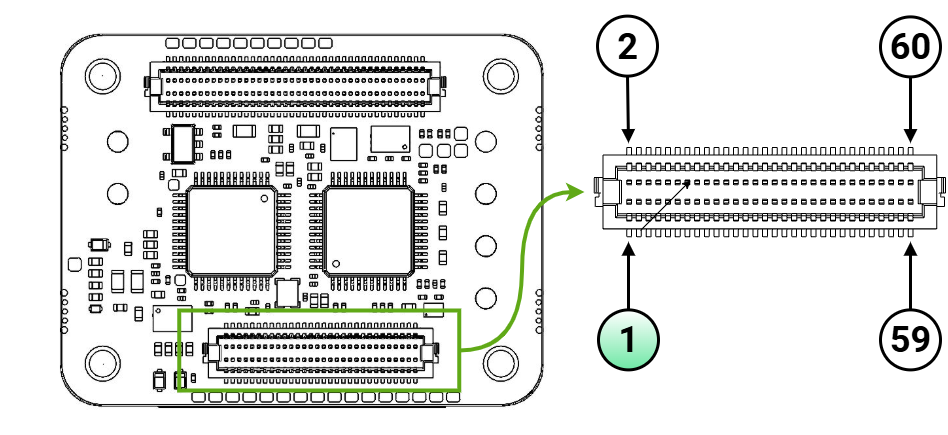
P3 Feedback connector
The connectors of EVS-S-NET are the same as EVS-NET, but the pinout has some minor modifications (indicated in yellow).
P3 Feedback connector | |||||||
|---|---|---|---|---|---|---|---|
# | Signal name | Description | Type | # | Signal name | Description | Type |
1 | GND_A | Analog Ground. If no external analog circuits are used, do not connect this pin at all. If used, do not connect this pin to GND_D directly. Instead, use a ferrite bead or 1 Ω resistor in between. | Power | 2 | GND_A | Analog Ground. If no external analog circuits are used, do not connect this pin at all. If used, do not connect this pin to GND_D directly. Instead, use a ferrite bead or 1 Ω resistor in between. | Power |
3 | DNC | Reserved. Do not connect (leave floating). | - | 4 | AN1_P | Analog input 1. Can be used for torque sensing. | 16 bit differential analog input - |
5 | DNC | 6 | AN1_N | ||||
7 | DNC | 8 | AN2_P | Analog input 2. Can be used for torque sensing. | |||
9 | DNC | 10 | AN2_N | ||||
11 | DNC | 12 | DNC | Reserved. Do not connect (leave floating). | |||
13 | MOTOR_TEMP | Motor temperature sensor input. 0 V to 5 V level high impedance input. | 12 bit single-ended analog input | 14 | DNC | ||
15 | GND_D | Digital signal Ground. | Power | 16 | DNC | Reserved. Do not connect (leave floating). | - |
17 | HALL_1 | Digital hall 1. 0 to 3.3 V level high impedance input. Typical Hall sensor interface based on pull-up and schmitt trigger buffer should be provided on the interface board. | Single-ended 3.3 V inputs. | 18 | DNC | - | |
19 | HALL_2 | Digital hall 2. 0 to 3.3 V level high impedance input. Typical Hall sensor interface based on pull-up and schmitt trigger buffer should be provided on the interface board. | 20 | GND_A | Analog Ground. If no external analog circuits are used, do not connect this pin at all. If used, do not connect this pin to GND_D directly. Instead, use a ferrite bead or 1 Ω resistor in between. | Power | |
21 | HALL_3 | Digital hall 3. 0 to 3.3 V level high impedance input. Typical Hall sensor interface based on pull-up and schmitt trigger buffer should be provided on the interface board. | 22 | GND_D | Digital signal Ground. | ||
23 | DNC | Reserved. Do not connect (leave floating). | - | 24 | DIG_ENC_1A | Incremental encoder 1 A. | Single-ended 3.3 V inputs |
25 | DNC | 26 | DIG_ENC_1B | Incremental encoder 1 B. | |||
27 | DNC | 28 | DIG_ENC_1Z | Incremental encoder 1 Index. | |||
29 | DNC | 30 | DIG_ENC_2A | Incremental encoder 2 A. | |||
31 | DNC | 32 | DIG_ENC_2B | Incremental encoder 2 B. | |||
33 | DNC | 34 | DIG_ENC_2Z | Incremental encoder 2 Index. | |||
35 | DNC | 36 | GND_D | Digital signal Ground. | Power | ||
37 | DNC | 38 | ABSENC1_CLK | Clock output for Absolute Encoder 1. Keep the capacitance below 60 pF to maintain the clock signal integrity at frequencies up to 10 MHz. | Output | ||
39 | 5V_FBK_SENSE | Analog input for sensing the 5V Feedback Supply. | Input | 40 | ABSENC1_DATA / ABSENC1_MISO | Data input for Absolute Encoder 1. Safety-related feedback - up to 2 BiSS-C encoders connected in daisy chain topology Non safety-related feedback only - SSI or EnDat 2.2 MISO. | Input |
41 | GND_D | Digital signal Ground. | Power | 42 | ABSENC1_MOSI | Non safety-related feedback only - Data output for Absolute Encoder 1 (EnDat 2.2 only). | Output |
43 | DNC | Reserved. Do not connect (leave floating). | - | 44 | GND_D | Digital signal Ground. | Power |
45 | DNC | 46 | DNC | Reserved. Do not connect (leave floating). | - | ||
47 | DNC | 48 | DNC | ||||
49 | DNC | 50 | DNC | ||||
51 | DNC | 52 | DNC | ||||
53 | DNC | 54 | DNC | ||||
55 | DNC | 56 | DNC | ||||
57 | DNC | 58 | DNC | ||||
59 | GND_D | Digital signal Ground. | Power | 60 | GND_D | Digital signal Ground. | Power |
Notes and naming conventions:
All pins are tolerant to 3.3 V unless otherwise noted.
Unused pins should be left unconnected.
"_P" and "_N" indicates positive and negative terminals of differential signals
"\" Indicates inverted (active low) signal
"NC" means Not Connected. Pins marked with NC can be tied to GND or 3.3 V, but the best practice is to leave them unconnected.
"DNC" means Do Not Connect. Pins marked with DNC must not be tied to any driving voltage, including GND or 3.3 V.
Manufacturer | Drive connector | Required mating connector | Description |
|---|---|---|---|
Hirose Electric | DF12NB(3.0)-60DP-0.5V(51) | DF12NB(3.0)-60DS-0.5V(51) | 60-pin mezzanine stacking board connector. 0.5 mm pitch. Center strip, gold-plated surface mount contacts. 3 mm stacking height. |
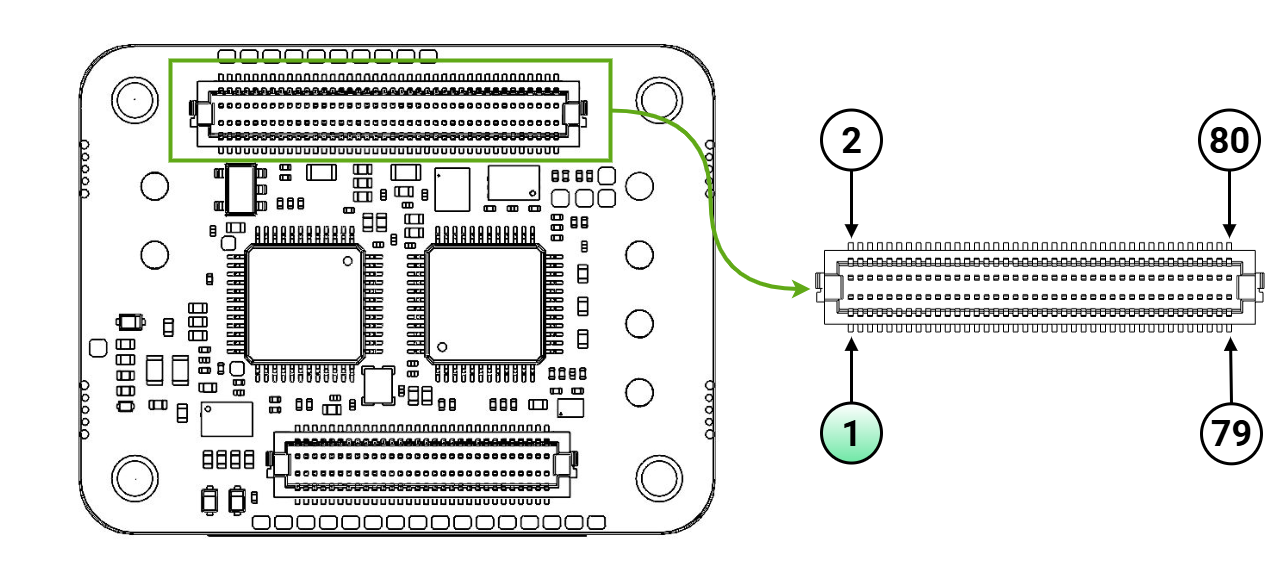
P4 Everest S NET Interface connector
The connectors of EVS-S-NET are the same as EVS-NET, but the pinout has some minor modifications (indicated in yellow).
P4 Everest S NET Interface connector
P4 Everest S Safe NET Interface connector | ||||||||
|---|---|---|---|---|---|---|---|---|
# | Signal name | Description | Type | # | Signal name | Description | Type | |
1 | 3.3V_REF | 3.3 V voltage reference output with sink/source capability up to ±10 mA. Excessive current demand or noise coupled to this pin can cause a loss of performance or even malfunction of Everest S NET: route by following the best layout practices. | Power output | 2 | DNC | Reserved. Do not connect (leave floating). | - | |
3 | GND_A | Analog Ground. If no external analog circuits are used, do not connect this pin at all. If used, do not connect this pin to GND_D directly. Instead, use a ferrite bead or 1 Ω resistor in between. | Power | 4 | 1.65V_REF | 1.65 V voltage reference output with sink/source capability up to ±10 mA. Excessive current demand or noise coupled to this pin can cause a loss of performance or even malfunction of Everest S NET: route by following the best layout practices. | Power output | |
5 | GND_D | Digital signal Ground. | 6 | GND_D | Digital signal Ground. | Power | ||
7 | 5V_D | 5 V, 1 A continuous logic supply input. Must be low ripple and ensure ±2% regulation tolerance or less. All four 5V_D pins must be connected. It is advised to provide at least 1.2 A input current if pins 13 or 14 (3.3V_D) are used to drive external circuits. | Power input | 8 | 5V_D | 5 V, 1 A continuous logic supply input. Must be low ripple and ensure ±2% regulation tolerance or less. All four 5V_D pins must be connected. It is advised to provide at least 1.2 A input current if pins 13 or 14 (3.3V_D) are used to drive external circuits. | Power input | |
9 | 5V_D | 10 | 5V_D | |||||
11 | GND_D | Digital signal Ground. | Power | 12 | GND_D | Digital signal Ground. | Power | |
13 | MAGNETICS_CT | 1.8 V dedicated voltage output for the EtherCAT magnetics center tap. Do not connect this pin to another voltage source or load other than the center tap of the EtherCAT transformers. Do not connect to pin 14. | Power output | 14 | 3.3V_SAFE_EXT | 3.3 V safe power supply output. This net is exclusive to power safety related circuits. Limited to 150 mA consumption. See Integration requirements. | Power output | |
15 | GND_D | Digital signal Ground. | Power | 16 | GND_D | Digital signal Ground. | Power | |
17 | GPO4 | Digital Output 4. | Output | 18 | GPI1 | Digital Input 1. | Input | |
19 | GPI2 | Digital Input 2. | Input | 20 | GPI3 | Digital Input 3. | ||
21 | DNC | Reserved. Do not connect (leave floating). | - | 22 | DNC | Reserved. Do not connect (leave floating). | - | |
23 | DNC | 24 | ABSENC2_CLK | Clock output for Absolute Encoder 2. Keep the capacitance below 60 pF to maintain the clock signal integrity at frequencies up to 10 MHz. | Output | |||
25 | ABSENC2_DATA | Data input for Absolute Encoder 2. Safety-related feedback - up to 2 BiSS-C encoders connected in daisy chain topology Non safety-related feedback only - SSI. | Input | 26 | DNC | Reserved. Do not connect (leave floating). | - | |
27 | DNC | Reserved. Do not connect (leave floating). | - | 28 | DNC | |||
29 | GPO1 | Digital Output 1. | Output | 30 | GPO2 | Digital Output 2. | Output | |
31 | GPO3 | Digital Output 3. | 32 | GPI4 | Digital Input 4. | Input | ||
33 | \SAFE_INPUT_A | Channel A of the redundant Safe Input 1. Active with low-level or open-circuit. See Integration requirements. | Input | 34 | \SAFE_INPUT_B | Channel B of the redundant Safe Input 1. Active with low-level or open-circuit. See Integration requirements. | Input | |
35 | GND_D | Digital signal Ground. | Power | 36 | FAULT_SIGNAL | Fault state signaling output. Can directly drive a (typically) red LED anode at 3.3 V up to 3 mA. | Output | |
37 | DNC | Reserved. Do not connect (leave floating). | - | 38 | GND_D | Digital signal Ground. | Power | |
39 | DNC | 40 | 3.3V_FBK_SENSE | Analog input for sensing the 3.3V Feedback Supply. If 3.3V_SAFE_EXT is used, it is recommended to connect 3.3V_SAFE_EXT to 3.3V_FBK_SENSE. | Input | |||
41 | PWM_BRAKE | PWM output for driving a mechanical brake. Configurable up to 40 kHz. A high level indicates the motor is free to move. Add a 10 kΩ ~ 47 kΩ pull-down resistor to this pin to ensure the brake is always in a safe state during boot-up or reset situations when this pin might be in high impedance. This pin is NOT safety-related. | Output | 42 | SOUT_A_DIAG_INPUT | Diagnosis input of the Channel A of the Redundant Safe Output. Active (failure detected) at low-level. CMOS voltage levels If not used, it is recommended to connect to pull up to 3.3V. | Input | |
43 | DNC | Reserved. Do not connect (leave floating). | - | 44 | SOUT_B_DIAG_INPUT | Diagnosis input of the Channel B of the Redundant Safe Output. Active (failure detected) at low-level. CMOS voltage levels If not used, it is recommended to connect to pull up to 3.3V. | Input | |
45 | DNC | 46 | GND_D | Digital signal Ground. | Power | |||
47 | DNC | 48 | DNC | Reserved. Do not connect (leave floating). | - | |||
49 | DNC | 50 | DNC | |||||
51 | BOOT/DNC | This pin can be pulled down to GND_D to force enter boot mode during power-up in FTP mode. Typically not necessary. If not used, always leave unconnected or pulled up with a 10 kΩ resistor. Never leave this pin permanently pulled down, as this would block the Everest S in boot mode. | I/O | 52 | DNC | |||
53 | DNC | Reserved. Do not connect (leave floating). | - | 54 | SOUT_A | Channel A of the redundant Safe Output. If not used, it is recommended to not connect (leave floating). | Output | |
55 | DNC | Reserved. Do not connect (leave floating). | - | 56 | DNC | Reserved. Do not connect (leave floating). | - | |
57 | DNC | 58 | SOUT_B | Channel A of the redundant Safe Output. If not used, it is recommended to not connect (leave floating). | Output | |||
59 | GND_D | Digital signal Ground. | Power | 60 | GND_D | Digital signal Ground. | Power | |
61 | DNC | Reserved. Do not connect (leave floating). | - | 62 | DNC | Reserved. Do not connect (leave floating). | - | |
63 | DNC | 64 | ECAT_CAN_ERR | State machine ERROR red LED for EtherCAT and CANopen. Can directly drive a red LED anode at 3.3 V up to 3 mA. | Output | |||
65 | ECAT_CAN_RUN | State-machine RUN green LED output for EtherCAT and CANopen. Can directly drive a green LED anode at 3.3 V up to 3 mA. | Output | 66 | DNC | Reserved. Do not connect (leave floating). | - | |
67 | \ETH0_LED_LINK | Ethernet Port 0 Link signaling. Must be connected to a high impedance or be buffered to drive a (typically) green LED. Use an inverting buffer to drive the LED anode or an open collector element to sink the cathode current. Place a 1k pulldown resistor to configure port 0 as capacitive coupling. Leave unconnected or pullup for magnetic coupling. | 68 | \ETH1_LED_LINK | Ethernet Port 1 Link signaling. Must be connected to a high impedance or be buffered to drive a (typically) green LED. Use an inverting buffer to drive the LED anode or an open collector element to sink the cathode current. Place a 1k pulldown resistor to configure port 1 as capacitive coupling. Leave unconnected or pullup for magnetic coupling. | Output | ||
69 | GND_D | Digital signal Ground. | Power | 70 | GND_D | Digital signal Ground. | Power | |
71 | PHY0_TX_P | EtherCAT Port 0 (Input). Cannot be used in CANopen drives. Ethernet physical layer differential pairs. 50 Ω pull-up termination resistors are included on the drive. Magnetics with the center tap connected to MAGNETICS_CT (pin 13) must be added externally. If this port is not used leave these pins unconnected. | I/O | 72 | PHY1_TX_P | EtherCAT Port 1 (Output) / Ethernet port (can be used in CANopen drives) Ethernet physical layer differential pairs. 50 Ω pull-up termination resistors are included on the drive. Magnetics with the center tap connected to MAGNETICS_CT (pin 13) must be added externally. If this port is not used leave these pins unconnected. | I/O | |
73 | PHY0_TX_N | 74 | PHY1_TX_N | |||||
75 | PHY0_RX_P | 76 | PHY1_RX_P | |||||
77 | PHY0_RX_N | 78 | PHY1_RX_N | |||||
79 | GND_D | Digital signal Ground. | Power | 80 | GND_D | Digital signal Ground. | Power | |
Notes and naming conventions:
All pins are tolerant to 3.3 V unless otherwise noted.
Unused pins should be left unconnected.
"_P" and "_N" indicates positive and negative terminals of differential signals
"\" Indicates inverted (active low) signal
"NC" means Not Connected. Pins marked with NC can be tied to GND or 3.3 V, but the best practice is to leave them unconnected.
"DNC" means Do Not Connect. Pins marked with DNC must not be tied to any driving voltage, including GND or 3.3 V.
Manufacturer | Drive connector | Required mating connector | Description |
|---|---|---|---|
Hirose Electric | DF12NB(3.0)-80DP-0.5V(51) | DF12NB(3.0)-80DS-0.5V(51) | 80-pin mezzanine stacking board connector. 0.5 mm pitch. Center strip, gold-plated surface mount contacts. 3 mm stacking height. |