How DC bus voltage is related to speed and torque in DC, BLDC and BLAC motors?
Three important variables of any driver design are the bus voltage to be used, the maximum torque and speed requested. These variables are not independent and are mutually connected. This means that depending on the provided bus voltage, the maximum speed or torque or both will be higher or lower. The objective of this document is to state this relationship and its main equations. However, it is not possible to simply summarize this issue in some equations and some dichotomy has to be done: identify the type of motor that is required to be used, the driver architecture, the control method, and several other strong constraints.
Motor Type
One important step before developing the analysis is to understand the type of motor that is wanted to be used: brushed or brushless; DC, BLDC or BLAC; in wye or triangle implementation. This topic has created ambiguity for ages as there is not a universal nomenclature. Nevertheless, it seems that Back Electromagnetic Force (BEMF) form is the easiest and most objective criteria. It is worth mentioning that BEMF is only generated by the permanent magnet flux and obtaining the details of this parameter is fundamental. Despite this fact, both motor and drive are involved in the definition and shape of BEMF. The motor is only part of the story and must be matched with a drive strategy.
BLDC Vs BLAC
Trapezoidal BEMF shape is associated to BLDC (Brushless DC) motors and sinusoidal BEMF is related to BLAC (Brushless AC) motors. However, these are just two extremes of a large spectrum of possible motors. BEMF shape depends on the magnet geometry, magnetization, stator core geometry and winding distribution. The objective of this document does not specifically analyze the architecture and design of motors but to understand the electrical and mechanical implications.
BLDC are driven with six steps wave commutation. Theoretically, this method is ripple-free. However, this is not absolutely true as this method implies sharp current transitions and they are not possible due to parasitic inductance. Typically, this type of motor provides higher torque and speed for a given voltage but this has just to be taken as a rule of thumb.
On the other hand, BLAC motors are also normally called Permanent Magnet AC (BMAC) or Permanent Magnet Synchronous Motor (PMSM) or sinusoidal BEMF motors. As long as the three poles are excited with sinusoids signals, BLAC motors are ripple-free even with high inductance values.
Wye Vs Triangle
The relationship between wye and triangular winding designs is important to properly understand the equations stated in the following chapters. This issue can be specifically understood from the following links:
https://en.wikipedia.org/wiki/Y-%CE%94_transform
Motor Variables
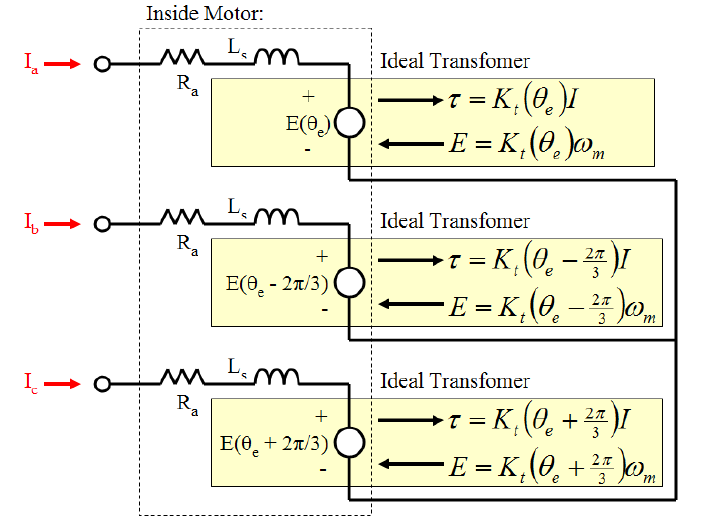
The objective of this document is to document the relation between bus voltage, maximum speed, and torque. To achieve this objective, some intrinsic motor variables must be known: series resistance, series inductance, and BEMF shape. To properly understand these motor variables the following motor model can be understood as generic. Truth be said, a wye motor is depicted but the triangle model would be exactly the same modifying the connections.
Series Resistance (Ra)
Series resistance (Ra) dissipates energy. It is important to know this value as at high current the applied voltage would be heavily different from the BEMF voltage. This data is normally provided by the motor manufacturer. However, it is simply measurable and the exact value can be known. A simple way would be measured with a common tester the resistance between two poles, series resistance would be the half of it in a wye motor. But this result can be improved by using the 4 probes method. Applying a low and known voltage to the motor and measuring the flowing current and the voltage just at the input of motors, the exact resistance can be obtained. It is important to mention that at DC voltage the series inductance shows no impedance.
Series Inductance
Series inductance stores energy. This value usually is underestimated and causes high inaccurate conclusions. There are several methods to compute this variable.
- Inductance can be measured in the time domain by computing time delay constant from a square signal input.
- If a function generator is available, parasitic inductance can also be calculated by using a frequency sweep to the motor. The details of this method can be understood here:
http://www.dos4ever.com/inductor/inductor.html
BEMF and Electrical Constant (ke)
BEMF converts energy. Understanding the exact shape of BEMF voltage is essential because of two reasons:
- Using a driver that supplies the correct and exact BEMF shape, the best power efficiency and durability of the design is achieved.
- Bus voltage, speed, and torque relations assume this match. Supplying a sinusoidal voltage in a BLDC motor possibly makes the motor move but maximum torque, speed, efficiency and durability are not achieved.
The best way to know the BEMF of a motor is to force mechanically to move at a certain speed. This can be done using the hand but the best and the more repetitive way is getting another motor and its drive properly calibrated and forcing the motor to be tested to move at a certain speed. Using this configuration, the motor will be tested at different speeds. The important data would be the shape and amplitude voltage at motor poles. When the speed increases, the voltage also increases. The relation between these two magnitudes is known as the electrical constant, ke.
BEMF=ke · w
BEMF: Back Electromagnetic Force (V)
ke: Electrical Constant (V/rad/s)
w: Rotational speed (rad/s)
At this point, it is important to include another important parameter of the motor: the number of poles pairs. The mechanical rotational speed can be different from the frequency observed at the voltage between poles of the motors as long as if the number of poles is higher than one, this frequency is multiplied. For example, if the number of poles pairs is two and w is referred to the mechanical rotational speed, ke must be multiplied by two. In other words, voltage frequency is the mechanical speed multiplied by the number of poles. This issue is essential as high errors can be induced from this slight difference.
Torque and Torque Constant (kt)
The mechanical force that the motor can deliver is named torque. The way that torque is related to the electrical magnitude is depicted in the following formula:
: Torque (N)
: Torque constant (N/A)
: Current (A)
DC Motor
DC motor is the simplest motor. Equations are simple as the applied and BEMF voltage are DC. Even parasitic inductance has no effect as long as at low frequency its inductance has no impedance effect. The BEMF voltage at a certain speed can be calculated as follows.
: BEMF DC Voltage (V)
: Electrical Constant (V/rad/s)
: Mechanical Speed (rad/s)
At this point, depending on the amount of torque required, more or less current consumption will be required and, consequently, higher or lower bus voltage will be demanded.
Assuming,
: Torque constant (Nm/A)
: Demanded Torqeu (Nm)
: Current Consumption (A)
BLAC Motor
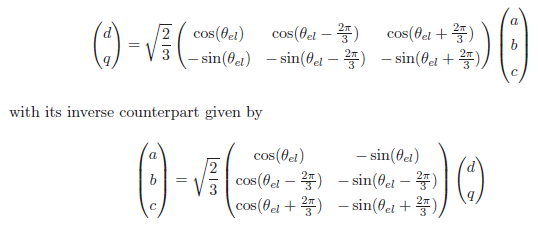
BLAC motors are excited with sinusoid signals at the three poles. The following equations assume that a Third Order Injection (THI) control is being implemented in order to improve the bus voltage usage. In order to control the motor motion, it is used the Field Oriented Control (FOC) or also known as d,q model. Please see the following equations describing this transform.

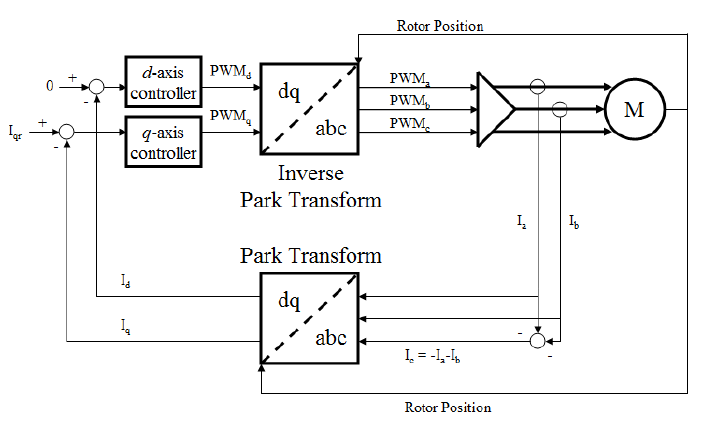
FOC is an advanced control technique used primarily for AC motors. It has the advantage of isolating the torque producing component of motor current from the field-augmenting or field-weakening component. This allows for a simple and independent torque controller. It is defined by 2 axes: direct (d) and quadrature (q) axes. With these axes, peak torque is always produced when all current is on the q axis. and aligned with the BEMF.
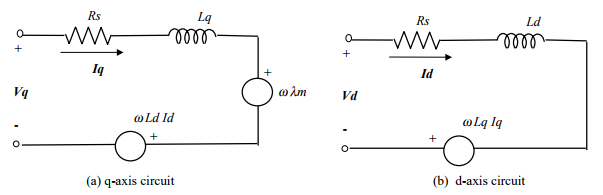
Also, it lets to get simpler motor models as they are presented hereafter:
Note that:
- Ke is the BEMF constant (per phase) divided by the number of pole pairs
- p is the derivative operator
- Ld and Lq are the quadrature and direct current. USUALLY approximated as 2/3 of L
A typical control is presented in the following figure.
Wye
The BLAC wye motor winding is depicted in the following figure.
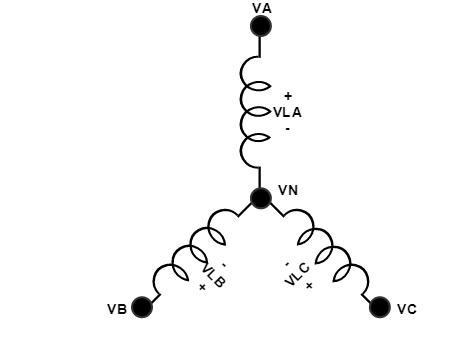
The voltage at each node and phase at each winding are stated hereafter.
With these equations and knowing R, L and ke, bus voltage, torque and mechanical speed can be related.
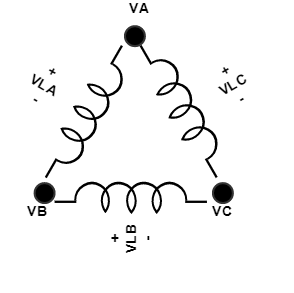
Triangle
How to obtain phase Torque constant:
The torque constant can be obtained from the BEMF constant. Considering that the BEMF electrical power is equal to the mechanical power we obtain:
How to calculate the torque constant for the D-Q model (power invariant version):
When using the power invariant D-Q model, the Ke and Kt parameters must be re-defined. The proceeding is the same as used before, equalling mechanical and electrical power.
The BEMF constant for the D-Q model is calculated as [REF]:
Which is directly converted from datasheet parameter as:
Then, considering the power equation: