How to calculate the output power of a Servo Drive
Maximum continuous output power
The maximum continuous output power than can provide a Novanta Motion Drive is calculated as it follows .
where :
is the maximum DC-bus voltage,
As an example, consider an Everest S XCR Servo Drive (EVS-XCR-E or EVS-XCR-C). According to the Product Description, the main parameters to calculate its maximum output power are:
Maximum absolute DC bus supply voltage (continuous): 80 V
Maximum continuous phase current = 45 A
Maximum DC Bus voltage utilization at 10kHz = 99.73% → 0.9973 pu
From these parameters we can calculate the maximum continuous output power of the Servo Drive as .
Power justification in a three-phase motor
Y-wired motor
The following diagram shows the electrical model of a Y-wired BLDC or PMSM motor:
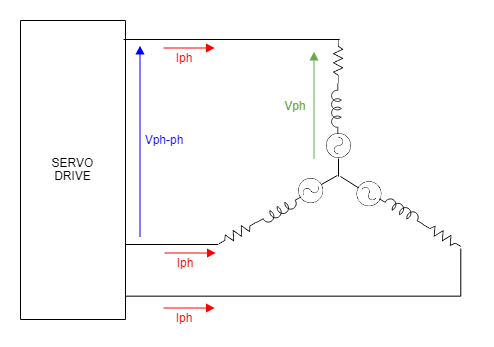
The power in any motor can be calculated as the sum of each phase power (product of RMS current and RMS voltage). In the case of a phase-balanced motor: .
In a Y-connected motor, the phase voltage () is defined as:
,
where is the phase-to-phase voltage (difference between two output terminals of the drive).
The amplitude of the drive output phase-to-phase voltage can be defined as follows:,
where
and
Summarizing, the power delivered to the motor can be defined as:
Note that the power is calculated from RMS values, while and
are expressed in amplitude of a sinusoidal. For this reason, the values are divided by
.
Δ-wired motor
From the point of view of a Servo Drive, the power provided to a Δ-wired motor or a Y-wired motor is exactly the same. However, the voltage and current values are shared different within the phases:
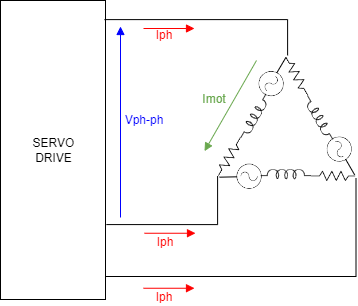
In a Δ-wired motor:
The motor current (
Therefore, the total power in a Δ-wired motor results as:
Which, from the point of view of a Servo Drive, it is equivalent than for a Y-wired motor.