0x2010 - Control word
Index | Sub Index | Name | Data Type | Acc. | Pdo Map. | NVM | Value range | Default value | Units |
|---|---|---|---|---|---|---|---|---|---|
0x2010 | 0x00 | Control word | UINT16 | RW | Yes | No | Data type | 0 | - |
This register allows operating the drive state machine and several modules.
Data description
The binary representation of the object value and its corresponding meaning is as follows:
Bit number | 15 | … | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|
Operation mode specific | Fault reset | Reserved | Run Set-Point Manager | Enable operation | Quick stop | Enable voltage | Switch on | ||||
State machine dedicated bits
Operation commands are generated by a combination of control word bits.
Command patterns are shown below:
Command | Bit of the control word | |||||
|---|---|---|---|---|---|---|
Fault reset | Enable operation | Quick stop | Enable voltage | Switch on | Typical control word value (decimal) | |
Shutdown | 0 | X | 1 | 1 | 0 | 6 |
Switch on | 0 | 0 | 1 | 1 | 1 | 7 |
Switch on + | 0 | 1 | 1 | 1 | 1 | 15 |
Disable voltage | 0 | X | X | 0 | X | 0 |
Quick stop | 0 | X | 0 | 1 | X | 2 or 11 |
Disable operation | 0 | 0 | 1 | 1 | 1 | 7 |
Enable operation | 0 | 1 | 1 | 1 | 1 | 15 |
Fault reset | 0 to 1 (rising edge) | X | X | X | X | 128 |
Bits marked with an "X" are irrelevant.
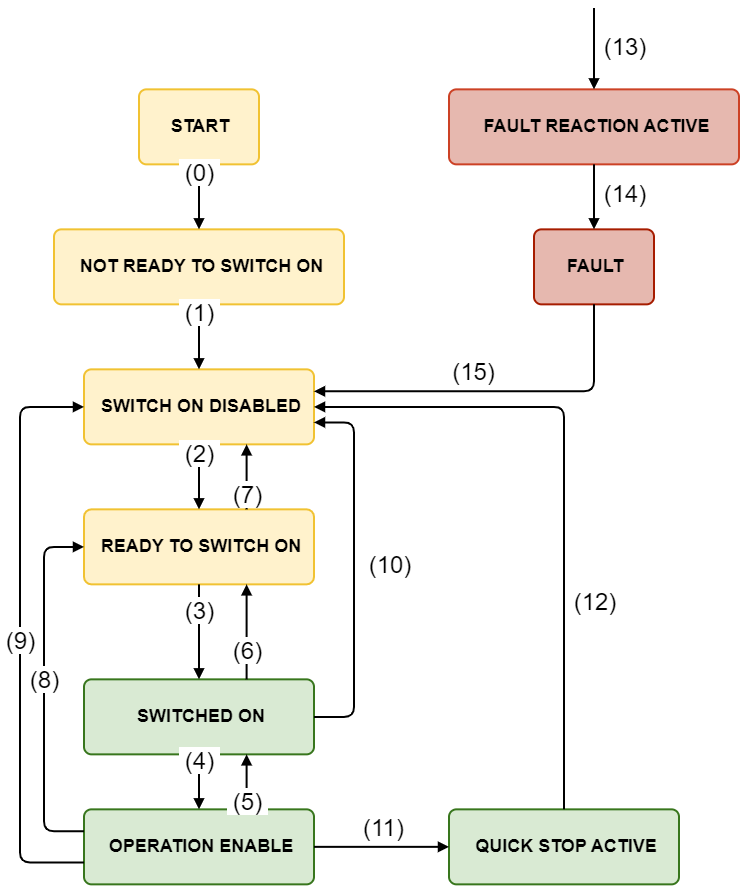
The controller supports the following events and actions.
Transition | Event | Action |
|---|---|---|
0 | Automatic transition after power-on or reset application. | Drive device self-test and/or self initialization is performed. |
1 | Automatic transition after initialization. | Communications are activated. |
2 | Shutdown command received. | None. |
3 | Switch on command received. | The high-level power is switched on. |
4 | Enable operation command received. | The drive function is enabled. |
5 | Disable operation command received. | The drive function is disabled. |
6 | Shutdown command received. | The high-level power is switched off. |
7 | Quick stop or disable voltage command received. | None. |
8 | Shutdown command received. | The drive function is disabled, and the high-level power is switched off. |
9 | Disable voltage command received. | The drive function is disabled, and the high-level power is switched off. |
10 | Disable voltage or quick stop command received. | The high-level power is switched off. |
11 | Quick stop command received. | The quick stop function is started. |
12 | Automatic transition when the quick stop function is completed or disable voltage command is received from control device (depending on Quick stop option code register). | The drive function is disabled, and the high-level power is switched off. |
13 | Fault signal. | The configured fault reaction function is executed. |
14 | Automatic transition. | The drive function is disabled, and the high-level power is switched off. |
15 | Fault reset command received. | A reset of the fault condition is carried out, if no fault exists currently on the drive. In this situation, after leaving the Fault state, the Fault reset bit in the control word is cleared by the control device. |
Profiler module dedicated bits
Those bits allow operating the profiler module. The binary representation of the object value and its corresponding meaning is as follows:
Bit number | 15 | ... | 12 | 11 | 10 | 9 | 8 | 7 | ... | 5 | 4 | 3 | ... | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Reserved | Abs / Rel | Unused | New set-point | Halt | - | Run Set-Point Manager | - | |||||||
Run Set-Point Manager bit
It's used for the Interpolation Buffer (modes IP and PVT).
Run Set-Point Manager | Description |
|---|---|
0 | Set-point manager is not being executed, and points are not being extracted from the interpolation buffer. |
1 | Set-point manager is running and it will extract points from the interpolation buffer. |
Halt bit
Halt | Description |
|---|---|
1 | In operation enabled state, the active movement will decelerate to 0 velocity as long as the Halt option code is not set to "do nothing". New absolute set-points performed while this bit is active will be taken into account after this bit is set to 0, as long as no operation mode change has happened. |
0 | The motor can run normally. If Halt bit is set to 0 after being set to 1, a new set-point latch may be necessary. |
New set-point bit
If no positioning is in progress, the rising edge of bit 4 will start the positioning of the axis. In case a positioning is in progress, the definitions given in the following table shall be used.
New set-point | Description |
|---|---|
0 → 1 | Next positioning shall be started immediately interrupting the actual one. If Halt bit is active, this action will be taken into account once the Halt bit is released, as long as no operation mode changes happened in between. |
Note
The first latch after a change of mode of operation or state machine's state, takes the actual value as start-up point. Further latches begin from the latest demand values.
Abs / rel bit
Bit 11 of the control word register indicates if the movement is absolute or relative:
Name | Value | Description |
|---|---|---|
Abs / rel | 0 | Target position is an absolute value. |
1 | Target position is relative to previous target. |
Homing dedicated bits
The binary representation of the object value and its corresponding meaning is as follows:
Bit number | 15 | ... | 10 | 9 | 8 | 7 | ... | 0 |
|---|---|---|---|---|---|---|---|---|
Unused | Start homing | Unused | - | |||||
If no homing is in progress, the rising edge of bit 9 will start the sequence.
Start homing | Description |
|---|---|
0 → 1 | Homing sequence is started |