Cogging compensation
Summit servo drives include the possibility to compensate the cogging effect of the motor.
Cogging is an effect caused by magnetic interaction between the motor rotor and the stator. It results in torque ripples over the motor revolution, which leads to uneven motion or generally unsatisfying performance of the motor at low velocities. Cogging compensation is a feature that suppresses torque ripple of electric motors to overcome vibration problems in high precision and low velocity applications.
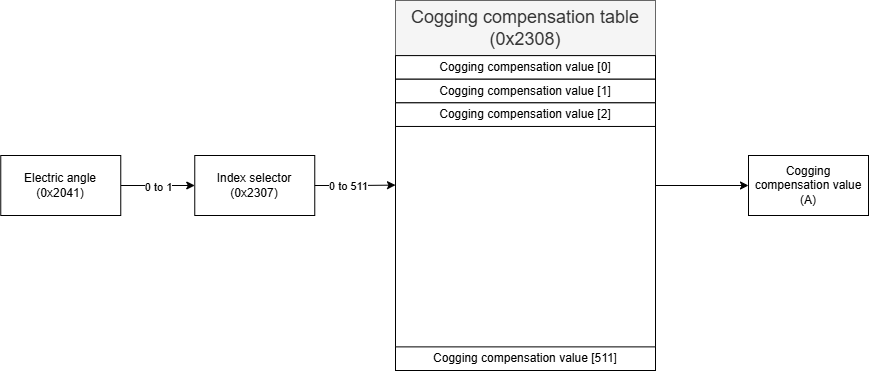
Cogging compensation is a LUT (Look-up table) that uses the electrical angle as a selector of the index:
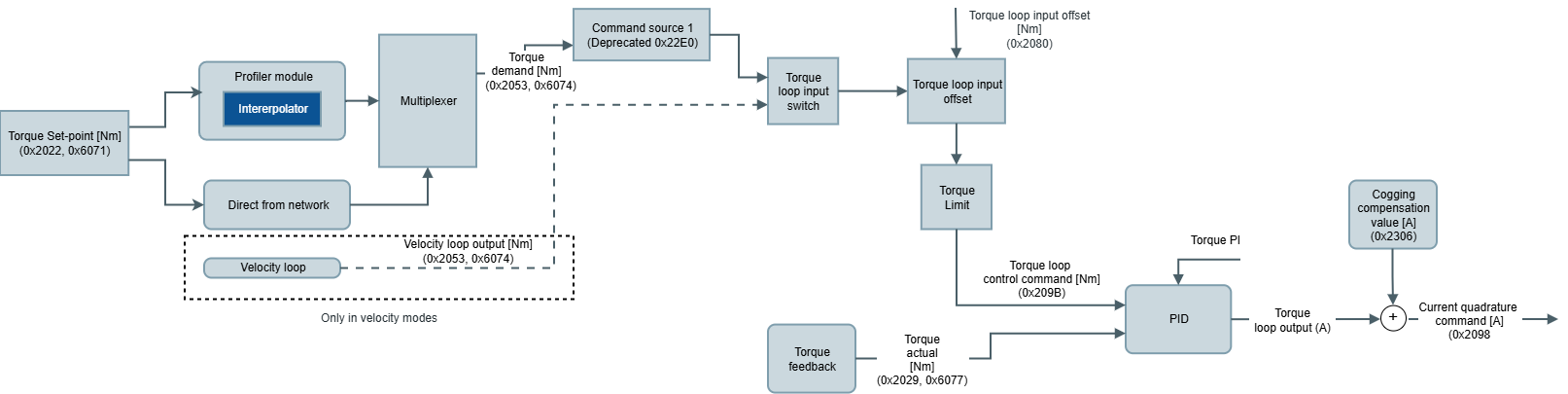
The value of the table is injected as an offset in the Torque loop output, and its unit is Amperes. See the following diagram:
The register to enable/disable the cogging compensation feature is the following:
0x2306 - Cogging compensation table - Enable
The registers to fill the table are the following:
0x2307 - Cogging compensation table - Index
0x2308 - Cogging compensation table - Value
To store the values of the table a store all process must be performed.