LEDs at start-up & Troubleshooting - Everest
LEDs at start-up & Troubleshooting
After powering on, some of the LED signals can help troubleshoot.
EtherCAT
Typical behaviour
If EtherCAT cables are connected on Port 0/1, Link LEDs will light according to the definition.
EtherCAT firmware will start with no other LED because the slave will stay in INIT State after power-up until an EtherCAT master forces it to transition to another state.
| LED signal | Start-up behaviour |
|---|
| RUN LED (Green) | - Off.
The slave will stay in INIT State after power-up until an EtherCAT master forces it to transition to another state.
|
| ERROR LED (Red) | - Off.
The slave will stay in INIT State after power-up until an EtherCAT master forces it to transition to another state. Then, some errors may appear.
|
| RUN & ERROR LED | - Both alternating On-Off (Orange) at 1 Hz.
Drive is in FTP bootloader mode, in standby.
|
| FAULT LED (Red) | - Off.
Off if initialization is correct, On otherwise.
|
The rest of the LED signals follow the standard behavior.
CANopen
| LED signal | Start-up behavior |
|---|
| RUN LED (Green) | - Off during initialization.
- Blinking (PRE-OPERATIONAL signaling) when initialization is done.
|
| ERROR LED (Red) | Off.
Indicates that CAN network is connected and working properly.
Start-up LEDs
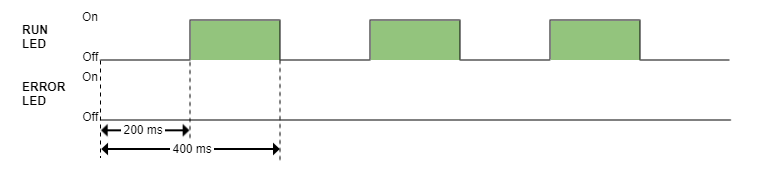
Single flash.
If a problem occurs during the transmission of the CAN boot-up message (a NMT message used to notify to the master the presence of the slave), the driver will signal it as shown below. This happens if CAN network is disconnected.
Start-up LEDs with CAN error
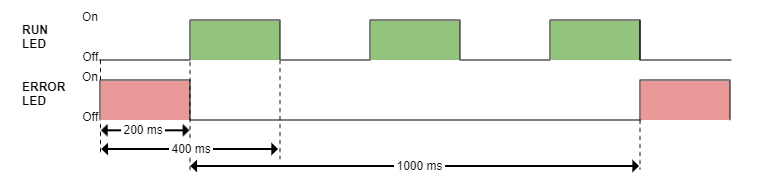
- On.
This indicates a CAN Bus Off error, most probably generated by a short between CAN high and CAN low lines.
|
| RUN & ERROR LED | - Both alternating On-Off (Orange) at 1 Hz.
Drive is in FTP bootloader mode, in standby.
|
| FAULT LED (Red) | - Off.
Off if initialization is correct, On otherwise.
|
The rest of the LED signals follow the standard behaviour