Voltage mode
This mode is used to apply a voltage directly to the actuator. It requires a proper configuration of the commutation sensor.
The commutation sensor configuration process is described in the Commutation section.
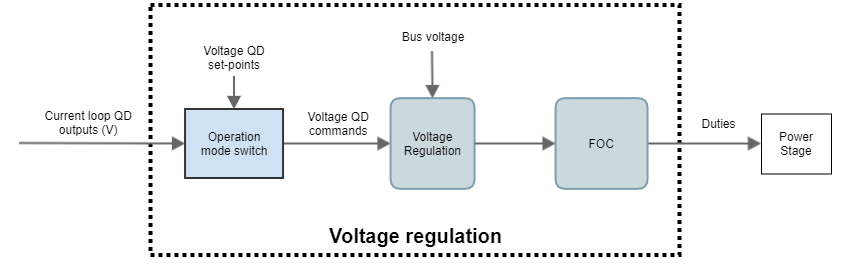
The voltage commands for the voltage module are provided in Volts and can come either from the current loop or directly from the voltage demands. Voltage demands come directly from the voltage set-points.
Inside the voltage regulation block, the voltage commands are converted to duty using the bus voltage readings at each specific time or the maximum duty cycle commanded taking the most restrictive from both.
Related registers:
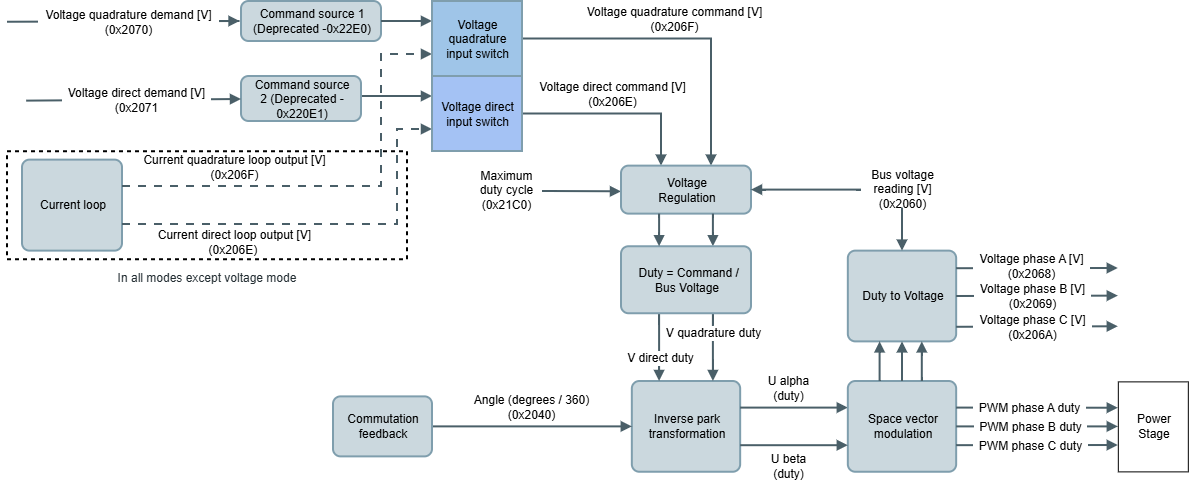
0x2018 - Voltage quadrature set-point and 0x2019 - Voltage direct set-point
0x2070 - Voltage quadrature demand and 0x2071 - Voltage direct demand
0x206F - Voltage quadrature command and 0x206E - Voltage direct command
0x2060 - Bus voltage value contains the instantaneous bus voltage reading
0x21C0 - Power stage maximum duty cycle contains the maximum duty cycle provided
0x2068 - Voltage phase A, 0x2069 - Voltage phase B and 0x206A - Voltage phase C
If software position limits are enabled using this mode of operation, the drive will generate a fault if the position limits are exceeded. Set them to 0 to disable this functionality or disable the fault generation masking it.
If actuator velocity overcomes the max. velocity parameter using this mode of operation, the drive will generate a fault. Disable the fault generation masking it.
If current measurements surpass the max. current parameter using this mode of operation, the drive will generate a fault. Disable the fault generation masking it.
In this mode, this drive is still protected by the main protections such as over/under voltage, over/under temperature, short-circuits, and I2T.