PVT Operation Guide
PVT (Position Velocity Time) is an operation mode that generates trajectories to reach a final position at a final velocity in a specific amount of time. This operation mode works in conjunction with an interpolation buffer, which allows to queue up to 16 sets of PVT points and run them in sequence.
This section describes the minimum steps required by an external master to move a motor using PVT operation mode. This operation mode triggers a series of movements based on information stored in the set-point manager and interpolation buffer of the driver.
It is highly recommended to read the Set-point manager and interpolation buffer section before following this guide. |
Configure motor and perform phasing
Follow the Motor phasing guide in order to configure the motor and align the feedback to be used with the system. No mode of operation will work correctly if this is not performed.
Configure control loops
In order to move the motor with a profiler, the control loops used by the selected mode of operation need to be configured. Follow the Motor tuning guide to obtain a basic configuration of the control loops, and apply it.
PVT operation
Once all the pre-configuration of the system has been finished, the following steps need to be followed in order to make the motor move using PVT
Select mode of operation
The Mode of operation register (0x014) needs to be set to PVT (180).
The generated PVT profile does not take into account the limits of the motor to generate its trajectories. This means that the master should take care of ensuring that the requested trajectories can be physically perfomed within the average limitations of the motor.
Make sure interpolation buffer can accept inputs
To move in PVT operation mode, the interpolation buffer should be filled with a set of points that can be then buffered out. Two conditions must be met for the buffer to allow input data
Enable the power stage
Ensure PVT operation mode is selected. (0x014)
Only when the Operation enabled state is active and PVT operation mode is selected, the interpolation buffer will push the input data records into its internal queue.
Fill in the interpolation buffer
Write the required inputs of the interpolation buffer: (Position input, Velocity input and/or Time input).
Increment the integrity check value (0x0C4) by 1. When the drive detects an increment of 1 in the integrity check it will buffer whichever values are configured in the position, velocity, and time inputs.
Check that the value of Interpolation buffer number of elements increments by 1, meaning that new data exists in the buffer.
Repeat these steps as many times as points are required in the trajectory
Begin the movement
PVT operation mode uses the set-point manager module to extract information from the interpolation buffer. Using this information, a trajectory is generated. The trajectory planned should reach the 'Position input', at the speed defined in 'Velocity input' and in the amount of time defined in 'Time input'. Once a trajectory finishes, the next set of information is extracted and executed.
New data points can be added to the buffer while the trajectories are being generated
To begin the movement:
Set the “Run set-point manager” bit to '1' in the Control Word register
If the ‘Run set-point manager’ bit is cleared, the current trajectory will be finished but no other points will be extracted from the interpolation buffer. Check the Interpolation data record status parameter (0x0C5) for more information about the status of the buffer.
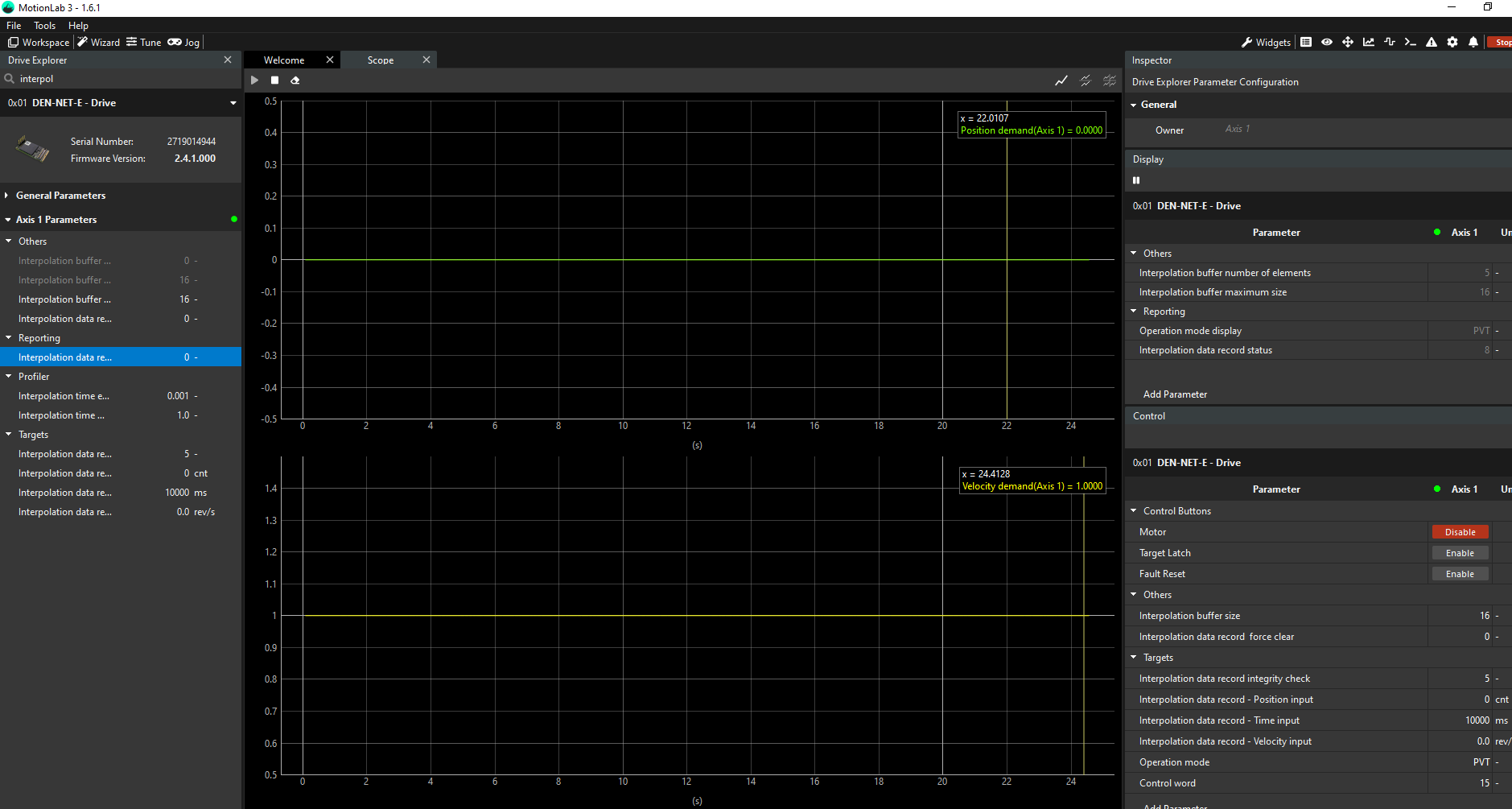
Interpolation buffer status and number of elements after being filled
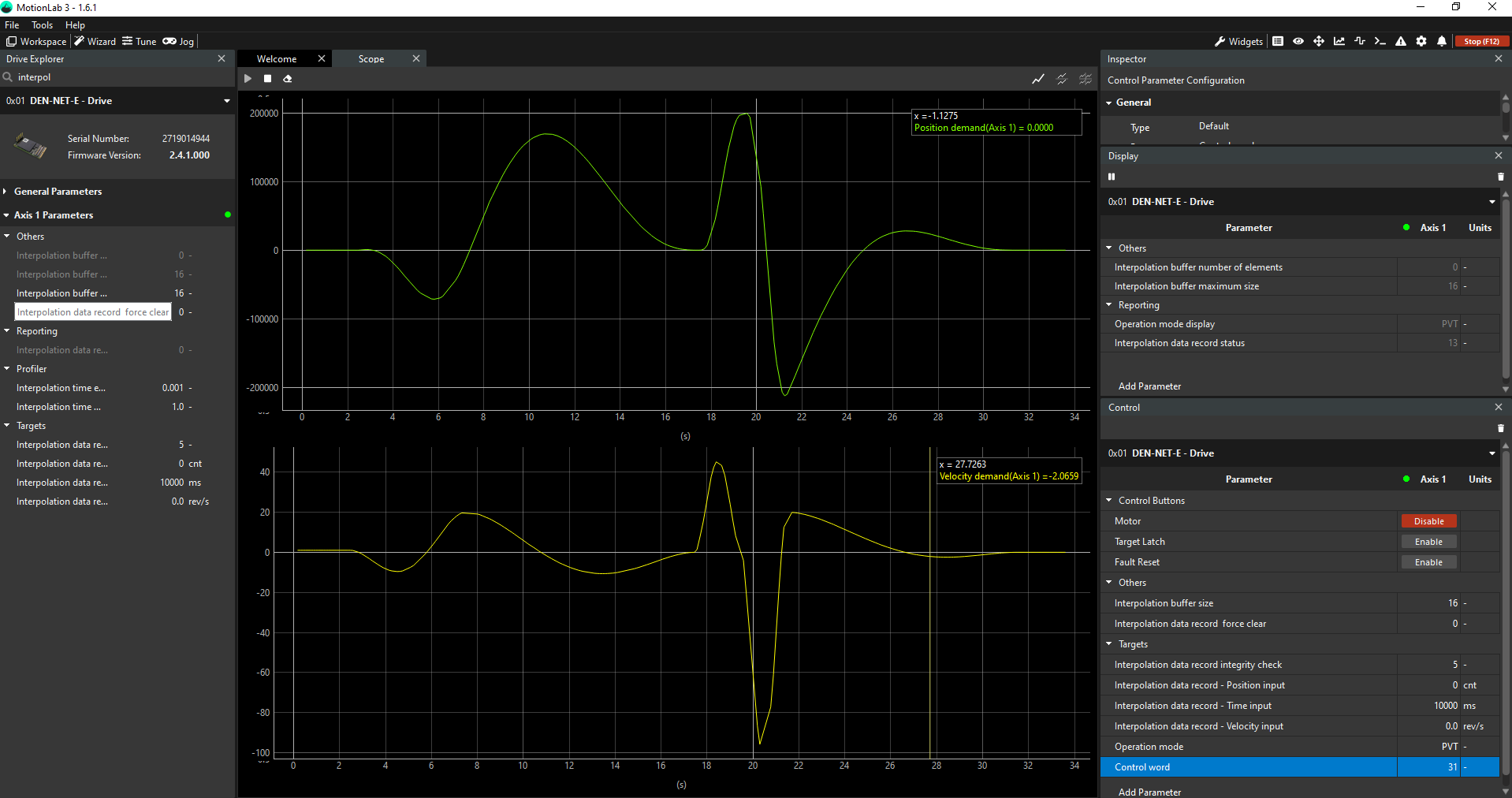
Position and velocity trajectories after running set-point manager