Signalling LEDs
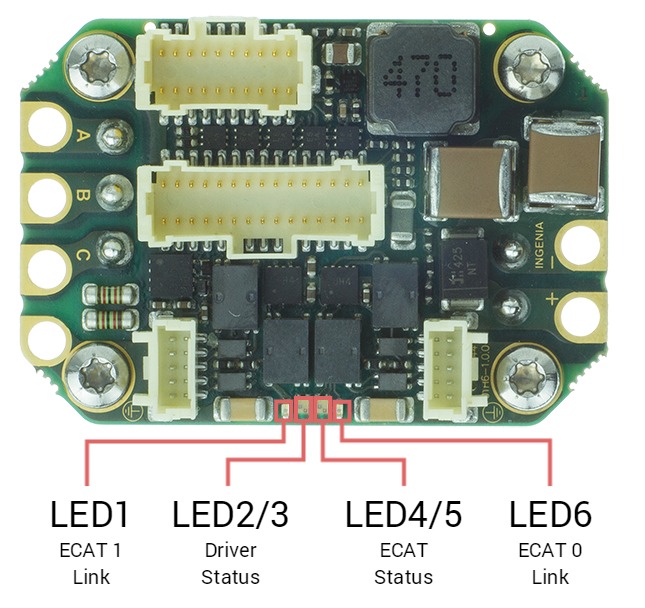
The drive provides information through 6 signalling LEDs:
| LED | Type | Color | Description |
|---|---|---|---|
| LED6 | Single | Green | EtherCAT / Ethernet 0 link (ECAT 0 Link or LINK0) |
| LED1 | Single | Green | EtherCAT / Ethernet 1 link (ECAT 1 Link or LINK1) |
| LED2/3 | Bi-color | Green / Red | Driver Status. Two LEDs indicate the driver status.
|
| LED4/5 | Bi-color | Green / Red | EtherCAT / CANopen Status (ECAT Status). Two LEDs indicate the EtherCAT or CANopen status.
|
The meaning of the signaling depends on the product variant, see LED signals reference for details.
LEDs at start-up & Troubleshooting
After powering on, some of the LED signals can help troubleshoot.
EtherCAT
Typical behaviour
If EtherCAT cables are connected on Port 0/1, Link LEDs will light according to the definition.
EtherCAT firmware will start with no other LED because the slave will stay in INIT State after power-up until an EtherCAT master forces it to transition to another state.
| LED signal | Start-up behaviour |
|---|---|
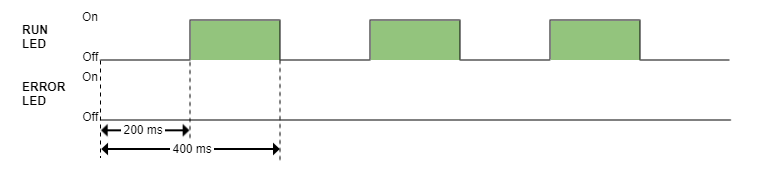
| RUN LED (Green) |
|
| ERROR LED (Red) |
|
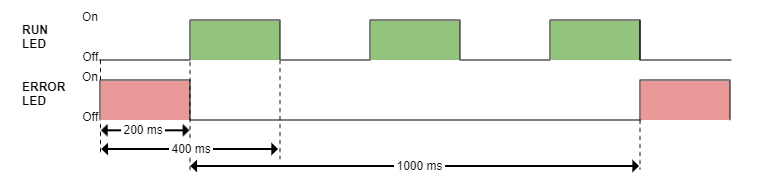
| RUN & ERROR LED |
|
| FAULT LED (Red) |
|
The rest of the LED signals follow the standard behavior.
CANopen
| LED signal | Start-up behavior |
|---|---|
| RUN LED (Green) |
|
| ERROR LED (Red) |
|
| RUN & ERROR LED |
|
| FAULT LED (Red) |
|
The rest of the LED signals follow the standard behaviour