Summit register dictionary
The functionality of the Summit product line is based on the register dictionary, which is a standardized structure containing all parameters describing the behavior of a Summit node.
Each drive is a node, and it is composed of subnodes, and the amount may depend on the product itself.
This architecture is very flexible and allows all topologies, from single-axis to multi-axis complex devices.
The following schema shows how the subnodes are organized.
Single axis node | Multi-axis node |
|---|---|
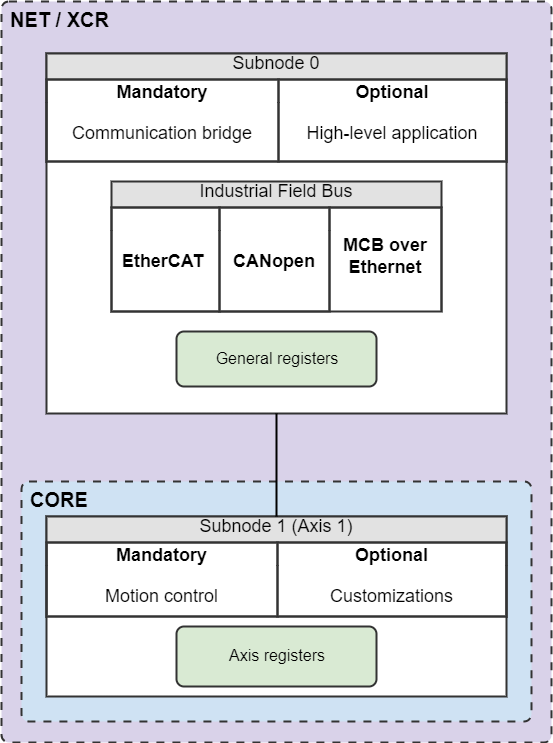 | 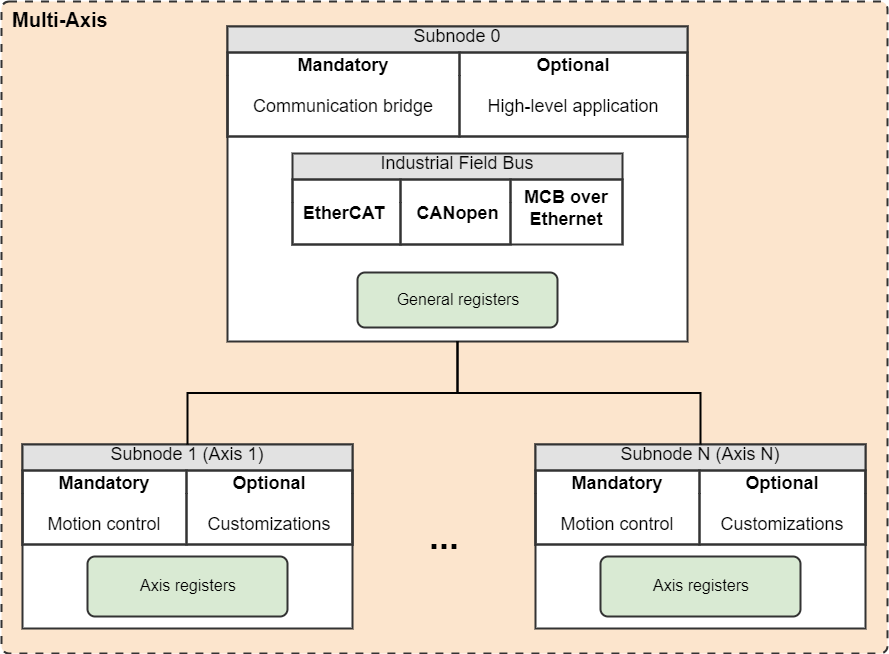 |
Subnode 0 must be always present in a node.
The maximum number of registers available in the Summit register dictionary is 2047 for each subnode, because the addresses can be in the range from 0x001 to 0x7FF.
Accessing the drive registers from different networks
The Summit register dictionary can be accessed both from MCB over Ethernet registers and from EtherCAT & CANopen registers from the manufacturer-specific indexes (between index 0x2000 to 0x5FFF).
There are no data conversions between them, this means that the application use is directly the same for both.
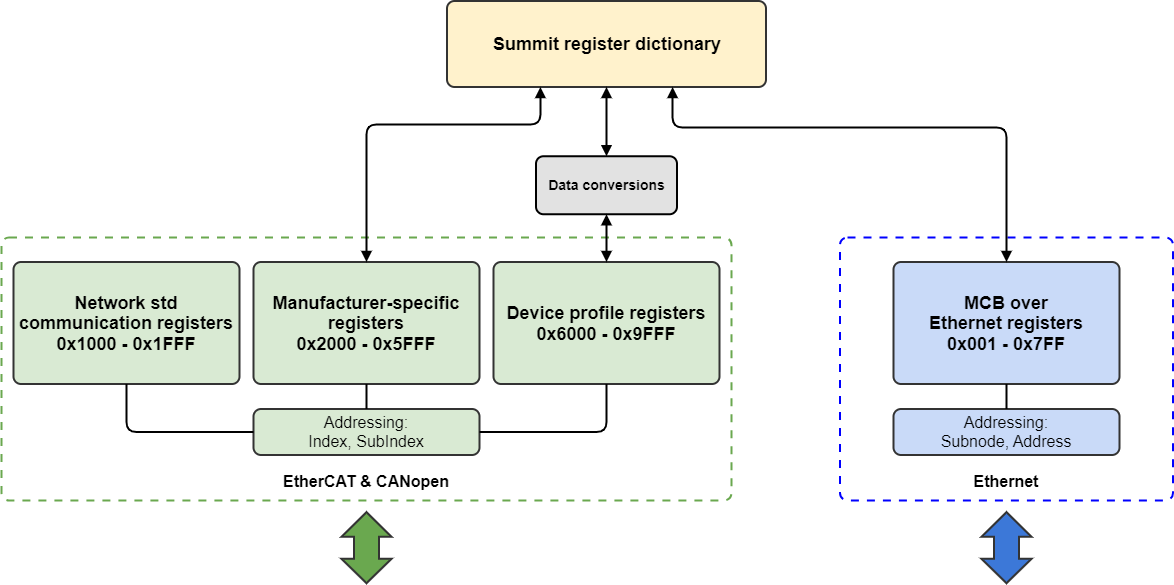
The drive implements 2 kinds of registers:
EtherCAT & CANopen registers. Those registers are accessed with Index-Subindex addressing, and they can be organized in the following categories:
Index range Group Description 0x1000 to 0x1FFF Standard communication registers Follow the network standard.
They are communication-related registers.0x2000 to 0x5FFF Manufacturer specific registers Those registers are the Summit register dictionary. 0x6000 and above Device-profile standard registers Follow the network standard.
They implement the CiA402 servo drive device profile.Writing to standard registers affect to the Summit register dictionary, and the same occurs in the opposite direction. Typically, there may be data conversions between both kinds of registers.
E.g. Writing the 0x6060-0x00 Operation Mode register will affect the Summit register 0x014 Operation Mode, and each one will have its own different data representation.
Not all the standard registers have a direct relation to the Summit register dictionary.
MCB over Ethernet registers. Those registers are accessed with the Ethernet protocol (Subnode and address), and they are directly in the Summit register dictionary.
Subnode 0 registers (general in Motionlab)
Those registers are the ones starting in EtherCAT & CANopen index 0x5800. The relation between the Index-Subindex and the Ethernet address is as follows:
MCB over Ethernet subnode | MCB over Ethernet address | Index-Subindex |
|---|---|---|
0 | A [0 to 0x7FF] | Index = 0x5800 + A Subindex = 0 |
Examples:
Register Last error (from subnode 0) has Index-Subindex 0x580F-0x00, which means it is from Ethernet subnode 0, with address = 0x00F.
Register store all (from subnode 0) has Index-Subindex 0x5EDB-0x00, which means it is from Ethernet subnode 0, with address = 0x6DB.
Subnode 1 registers (axis 1 in Motionlab)
Those registers are the ones starting in EtherCAT & CANopen index 0x2000. The relation between the Index-Subindex and the Ethernet address is as follows:
MCB over Ethernet subnode | MCB over Ethernet address | Index-Subindex |
|---|---|---|
1 | A [0 to 0x7FF] | Index = 0x2000 + A Subindex = 0 |
Examples:
Register quick stop option code has Index-Subindex 0x260B-0x00, which means it is from Ethernet subnode 1, with address = 0x60B.
Register voltage phase A has Index-Subindex 0x2068-0x00, which means it is from Ethernet subnode 1, with address = 0x068.
Subnode N registers (axis N in Motionlab)
Those registers only apply for multi-axis devices.
Those registers are the ones starting in EtherCAT & CANopen index 0x2000. The relation between the Index-Subindex and the Ethernet address is as follows:
MCB over Ethernet subnode | MCB over Ethernet address | Index-Subindex |
|---|---|---|
N [1 to N] | A [0 to 0x7FF] | Index = 0x2000 + (0x800 * (N - 1)) + A Subindex = 0 |
Examples:
Register quick stop option code from different axis would be:
Axis 1: Index-Subindex 0x260B-0x00, which means it is from Ethernet subnode 1, with address = 0x60B.
Axis 2: Index-Subindex 0x2E0B-0x00, which means it is from Ethernet subnode 2, with address = 0x60B.
Axis 3: Index-Subindex 0x360B-0x00, which means it is from Ethernet subnode 3, with address = 0x60B.
...