Homing setting
Homing is used to mechanically move a motor (connected to a mechanism) to a specific location on the machine, referred to as “home”. Motion tasks then use this home as a reference point for movements that must base a known position on this reference point. Motor movement is usually controlled by a variety of limit switches (end of travel) and a home reference switch. Using these reference points with the logic of the drive allows the machine to find and set the home reference point.
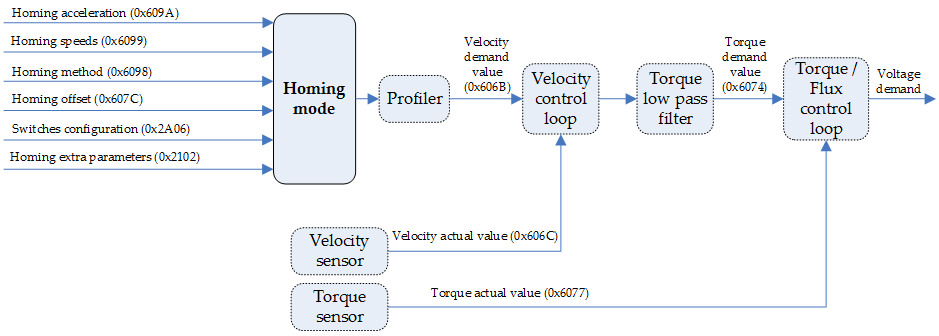
Ingenia Drives includes a variety of homing methods to accommodate your machine needs. They are structured according to the following diagram:
The parameters configurable by the user are described below.
| Parameter | Description |
|---|---|
| Homing method | Indicates the selected homing method |
| Homing accelearation | Defines the acceleration used for all accelerations and decelerations in homing methods. |
| Homing offset | Indicates the configured difference between the zero position for the application and the machine home position, as found during the homing process. |
| Homing timeout | Indicates the maximum time to complete the whole homing process. If the homing is not completed within this time, the homing process will be aborted, and en error will be trigered. |
| Speed searching for limit | Defines the speed to use when searching a switch or mechanical limit (can be considerable faster than Speed searching for zero). |
| Speed searching for zero | Defines the speed to use when searching the actual homing point (should be considerable slowly than Speed searching for limit) |
| Torque threshold | For homing methods -1, -2, -3 and -4, this parameter indicates the threshold of torque to consider that a physical limit has been reached. |
An animated illustration representing the homing method selected can be seen by clicking on the PLAY button at the right panel.