Configuring your Drive
The MotionLab allows to configure all the settings of your drive in a sequential logical way. That is:
Drive Operations
After connecting to your servo drive, the below operations and options will be displayed in a toolbar at the top of the application:

Operation | Description |
|---|---|
Load | Load a configuration file into the drive. |
Save | Save current drive configuration to a file. Users can save configurations at any time. This is very useful when a system has been completely set up and you want to store the parameters to download them into other identical systems. To save a configuration, click the Save button. The output format for configuration file is an XML Device Configuration (XDC) file according to CiA311 standard. |
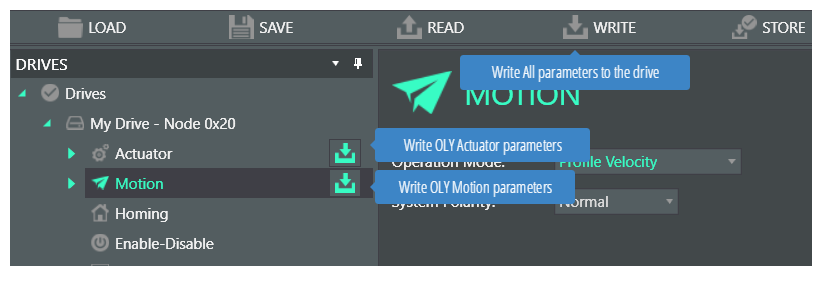
Read | Read all drive parameters |
Write | Write current configuration to the drive (all parameters) Individual parameters can be downloaded to the drive through the PageTree control
|
Store | Save actual drive configuration to the non-volatile memory |
| Parameters | Open parameters window. Parameters Window displays a list of all the parameters that the drive supports. A search box allows to search them by different criteria: name, index, sub-index, etc. Some of the parameters can be modified from this screen (Access type = ReadWrite or WriteOnly). The following options are available at the top menu:
|