Velocity
In profile velocity mode, the target velocity is processed immediately on reception and is delivered to the profiler afterwards. According to the predetermined parameters, the profiler generates and provides the control unit with the instantaneous target torque to be achieved. Upon reaching the target velocity, the drive status is updated.
Notice that, even though the system closes a velocity loop, the actuator is controlled through torque demand. This is due to the update rate of the torque measurements supported being one order of magnitude higher than the update rate of the position and velocity measurements, therefore being able to perform a finer grain control of the motion. In addition, this allows the system to take into account the maximum motor current and torque into the control loop.
The window for this modes of operation contains 4 main areas: Enabling, Indicators, Configuration and Charting.

Enabling operation
This area of the window contains the controls to enable/disable the motor.
- To enable the motor click on the ENABLE button.
- To disable the motor click on the disable button or use the F12 shortcut at any time
Indicators
A display with several information as follows:

Configuration
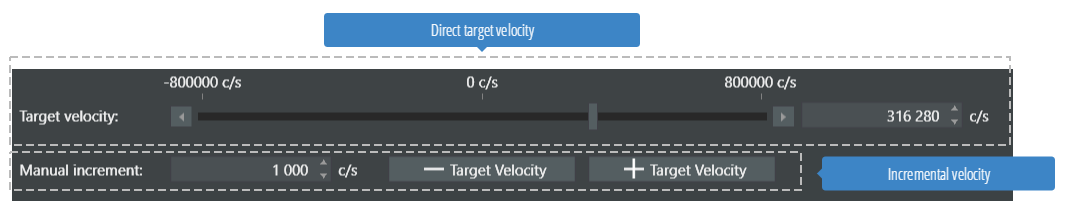
The motion parameters are organized by tabs. The target tab allows for setting up the target velocity and can be specified by three different means.
- Direct target velocity: Specify through the slider or the editable box a target position.
- Incremental velocity: Using the buttons - or + and defining a step size.
Profiler, Limits,Thresholds and Control Loop tabs allow for configuring several motion parameters related to the motion of the system. Their meaning and accepted values can be found in the Motion subchapters.
Charting
There are 2 possible charts. Live view and Precision view.
- Live view polls data from at specified rate.
- Precision view, allows precise time-based monitoring. In this mode, the drive captures data at the specified rate, store it into an internal buffer and send it to the software.