Drive overview
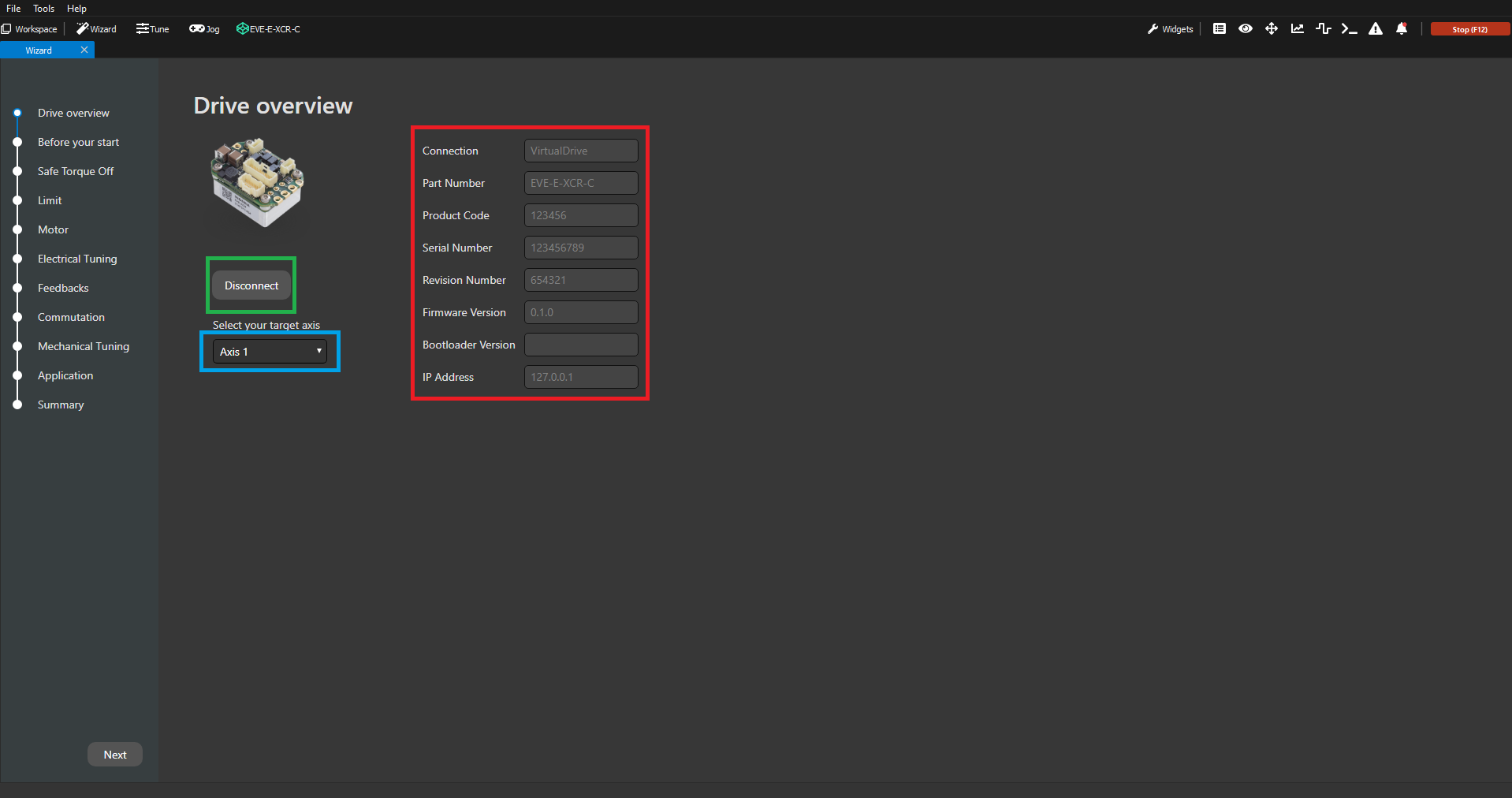
This page is shown when the drive is connected and includes the drive information (red), such as:
Connection: the communication protocol used to establish the connection with the drive.
Part number: an identification of the product.
Product code: a numeric product identification.
Serial number: a unique value that identifies the drive.
Firmware version: the firmware version installed in the drive.
The other parameters could be needed for troubleshooting by the Tech team. It also has a button to disconnect the drive (green) and a dropdown to select the target axis (blue).