Connect through EtherCAT using the EoE service
In order to use Ethernet connection between the PC and the drive, the network adapter must be on the same subnet as the drive. Remember that the drive’s default IP is 192.168.2.22.
For network adapter configuration instructions see: Configuring a network adapter for Ethernet connection
This is an advanced connection mode via EtherCAT that requires additional setup. For a simple approach, see Connect via CoE.
Beta version
This is a feature still under development and it may contain issues.
Possible issues when connecting via EoE service
Ensure the EoE service is running with administrator privileges.
Verify you have selected the correct network adapter.
You do not need to configure a static IP address on the network adapter used to connect to the EtherCAT slaves.
Ensure that no EtherCAT master is running in your PC (TwinCAT, Acontis...).
WinPcap must be installed before using the EoE service.
Other software, such as antivirus software, may block communications. We recommend using Windows Task Manager to find suspicious processes that may block them.
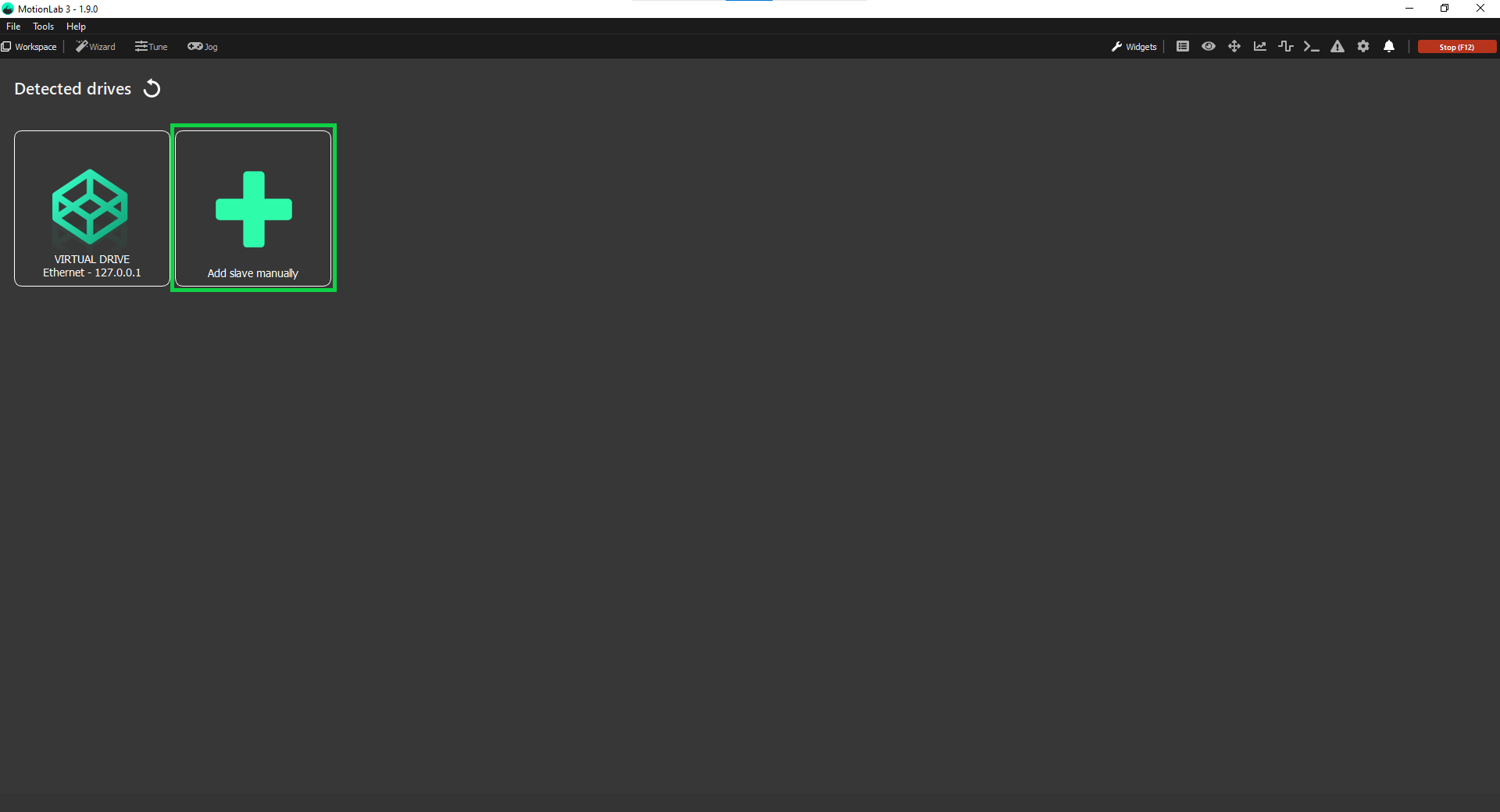
Open MotionLab3 and click Add slave manually:
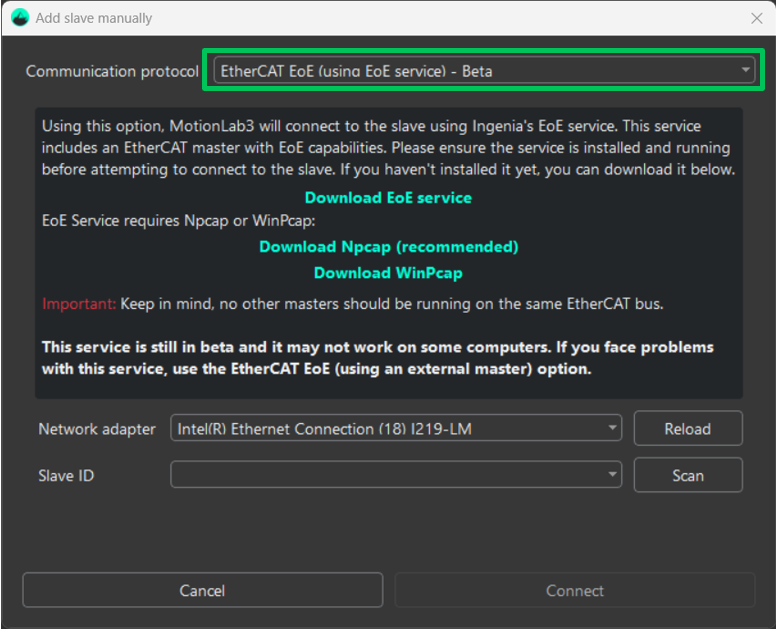
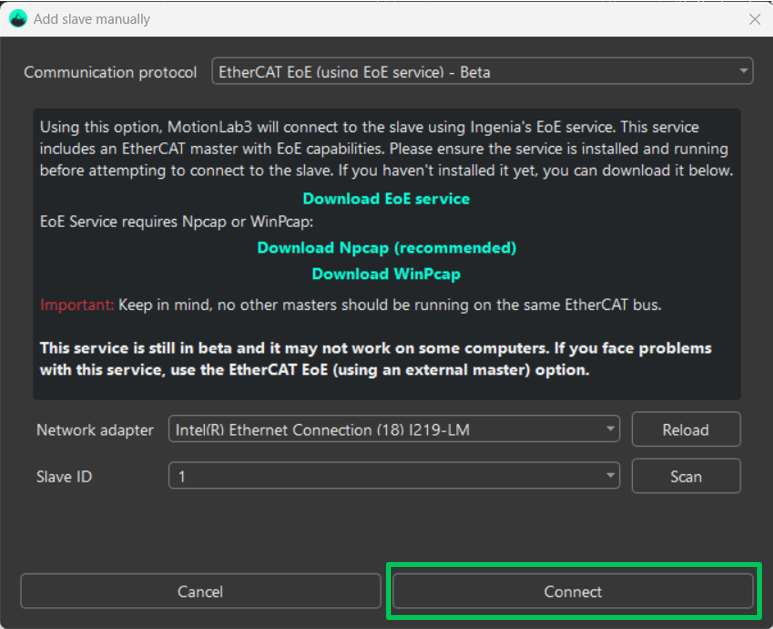
From the dropdown select the “EtherCAT EoE (using EoE service) - Beta” communication protocol:
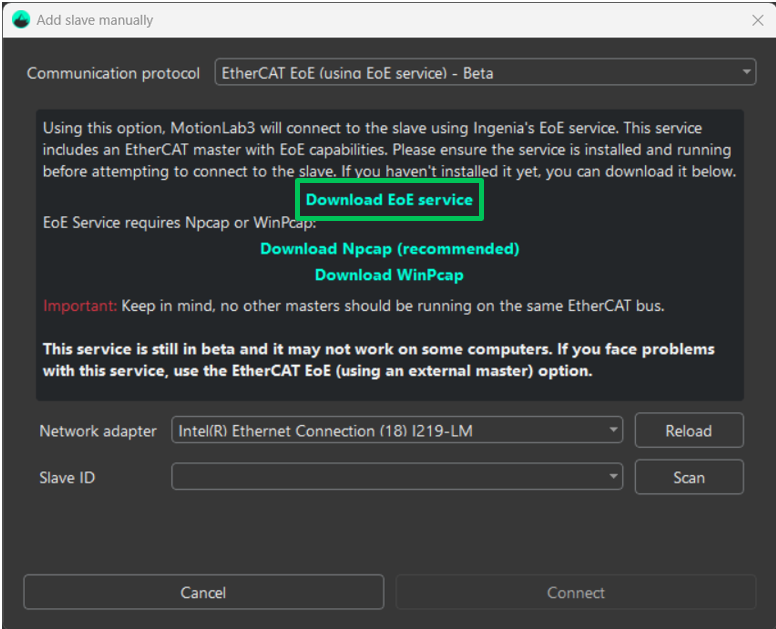
Click “Download EoE service“ to access the download website where the EoE .zip can be downloaded.
Extract the archive from the .zip and run the executable to start the EoE service.
If a pop-up asking for admin privileges appears, enter admin credentials if required and press Yes.
The EoE service will start in a new window.
The EoE Service runs independently of ML3. Closing ML3 will not stop the EoE Service.
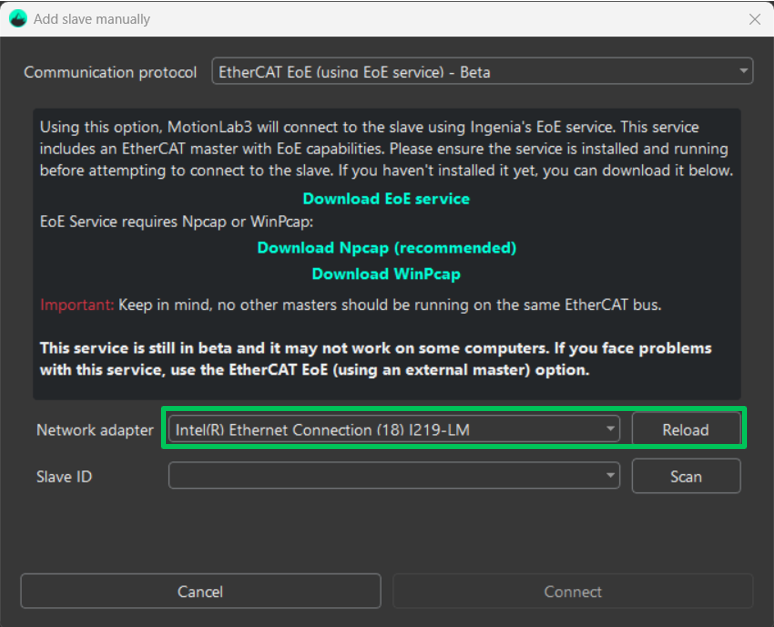
Return to MotionLab3 and select the network adapter connected to the drive. The Reload button can be clicked to refresh the adapter list if needed.
Press Scan. EtherCAT drives connected to the target adapter will be detected. Alternatively you can also enter the Slave ID manually.
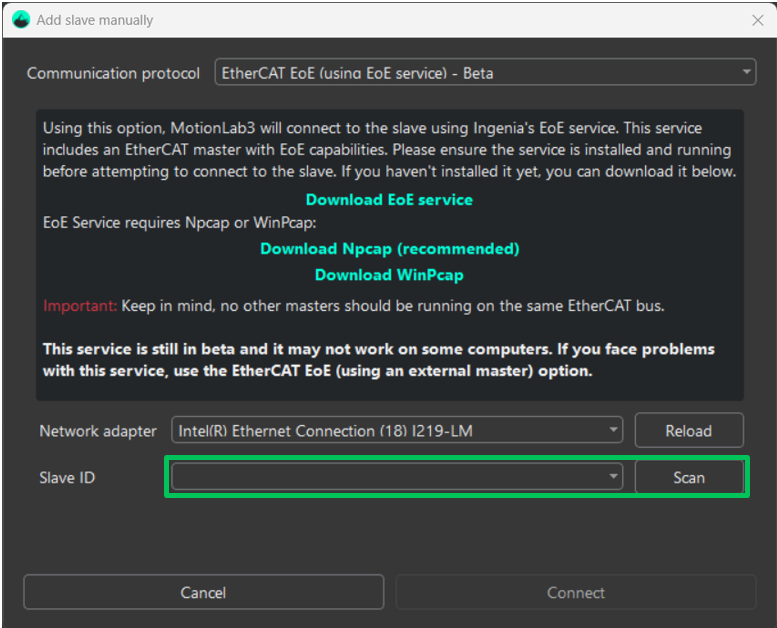
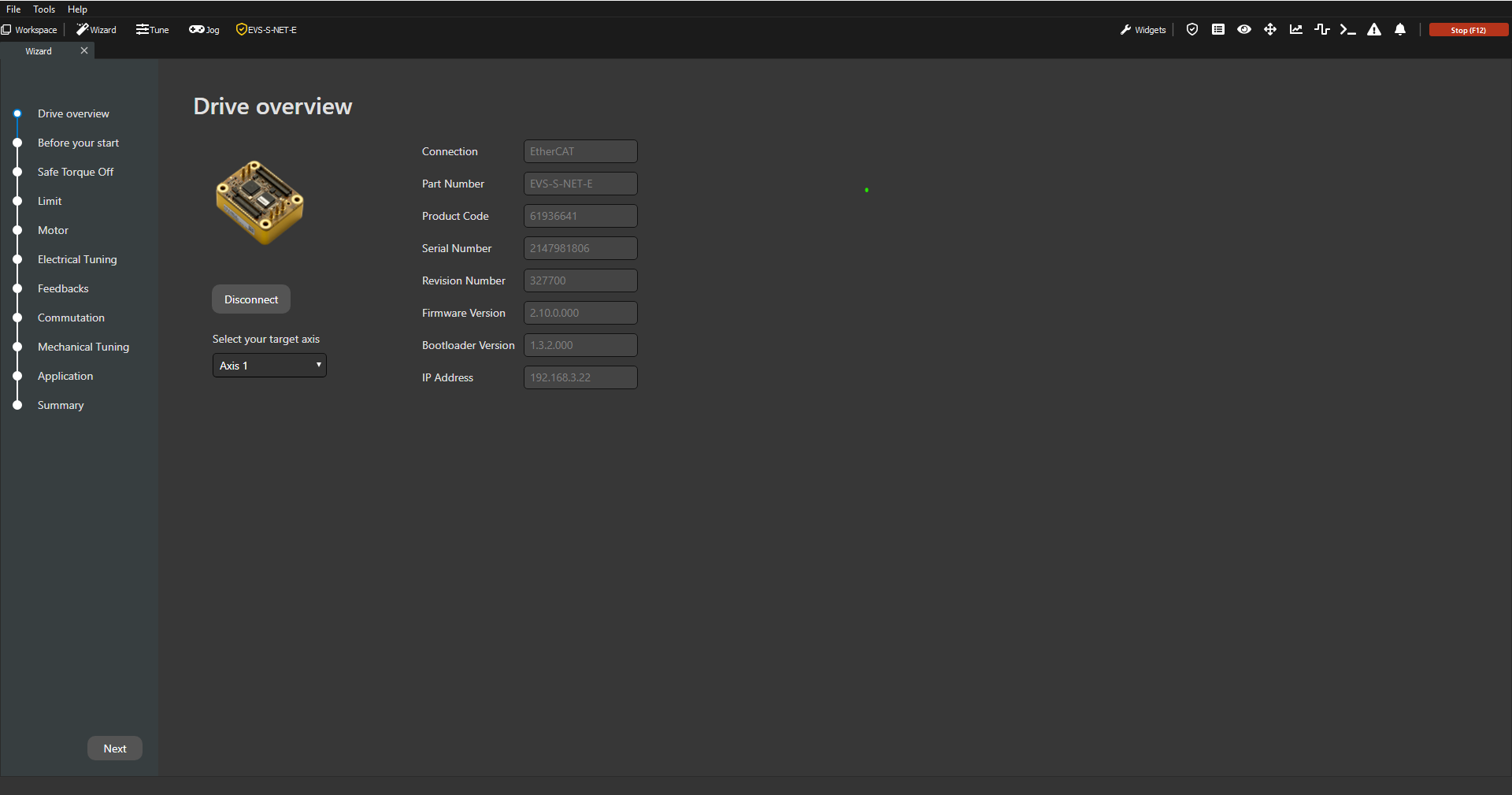
Press the Connect button:
MotionLab3 will now connect you to the drive: