Safe Torque Off - Hardware
This section is only available on drives with STO by Hardware
This step of the configuration Wizard is used to check that the drive's safe torque off (STO) hardware protection is properly powered on.
Bypassing the STO protection
It is important to note that the STO is a hardware protection that cannot be bypassed from a firmware/software side under no circumstances. Therefore, you need to make sure that it is wired and powered correctly. If you have any doubts on how to do this check the following section of the manual: Brake and Motor Temperature.
This STO checking is done with the "STO TEST" button shown in the picture below which basically is checking some registers on the firmware that are reporting the state of STO1 and STO2 inputs:
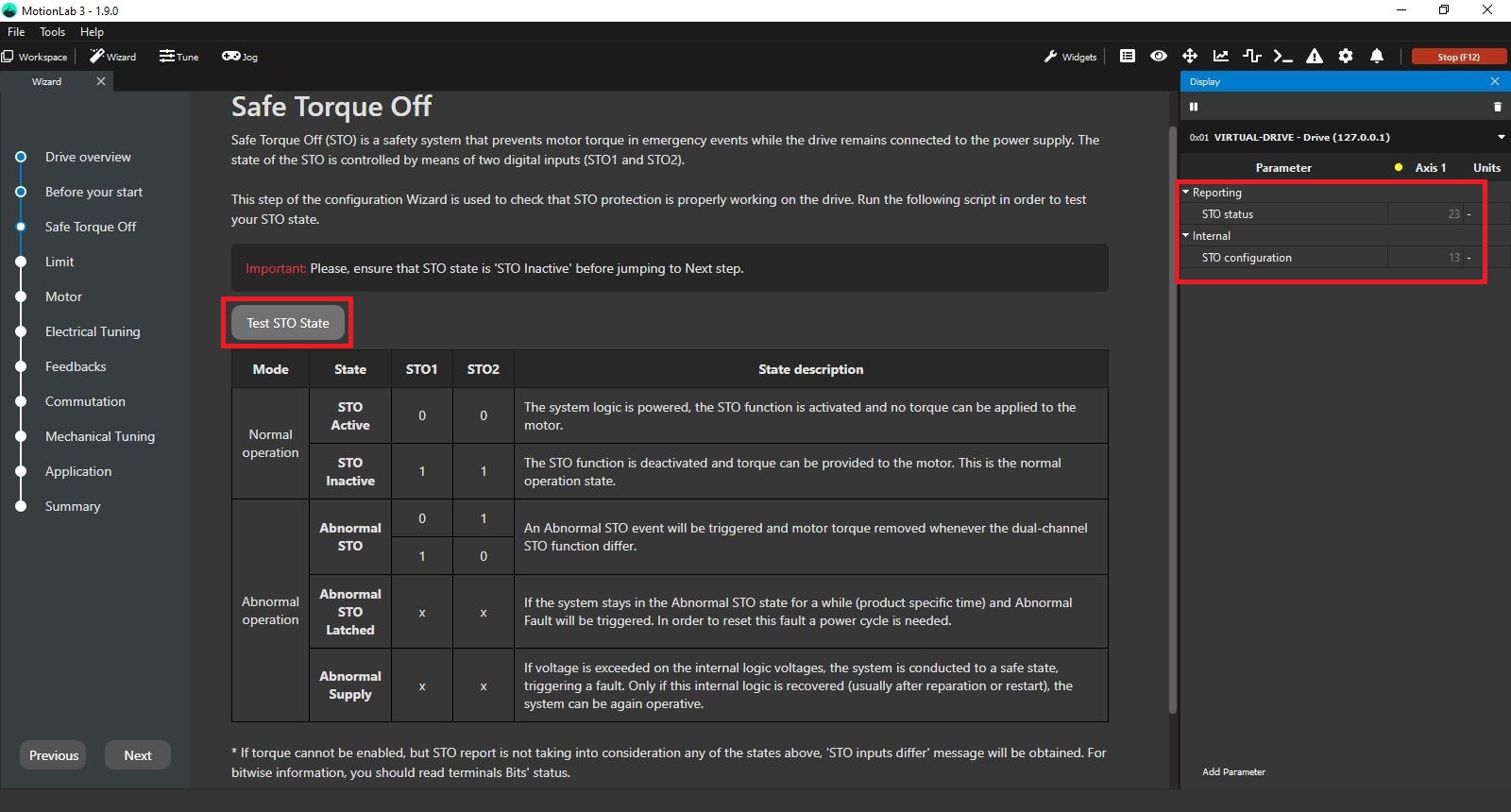
Basically, depending on the state of STO1 and STO2, you will get different "STO status" values that relate to different interpretations (you can learn more about these registers here: Motor and brake):
4 → STO 1 and 2 are not connected to a +5V power source
23 → STO 1 and 2 inputs are properly powered from a +5V voltage source
31 → STO 1 and 2inputs are not seeing a stable +5V voltage source. Check wiring and voltage readings between STO1, STO2, GND and STO_RET
This is what the "STO TEST" button will do, it will check that the STO status is reporting a value of 23 or otherwise it will give out an failure message with an explanation on what the problem is:
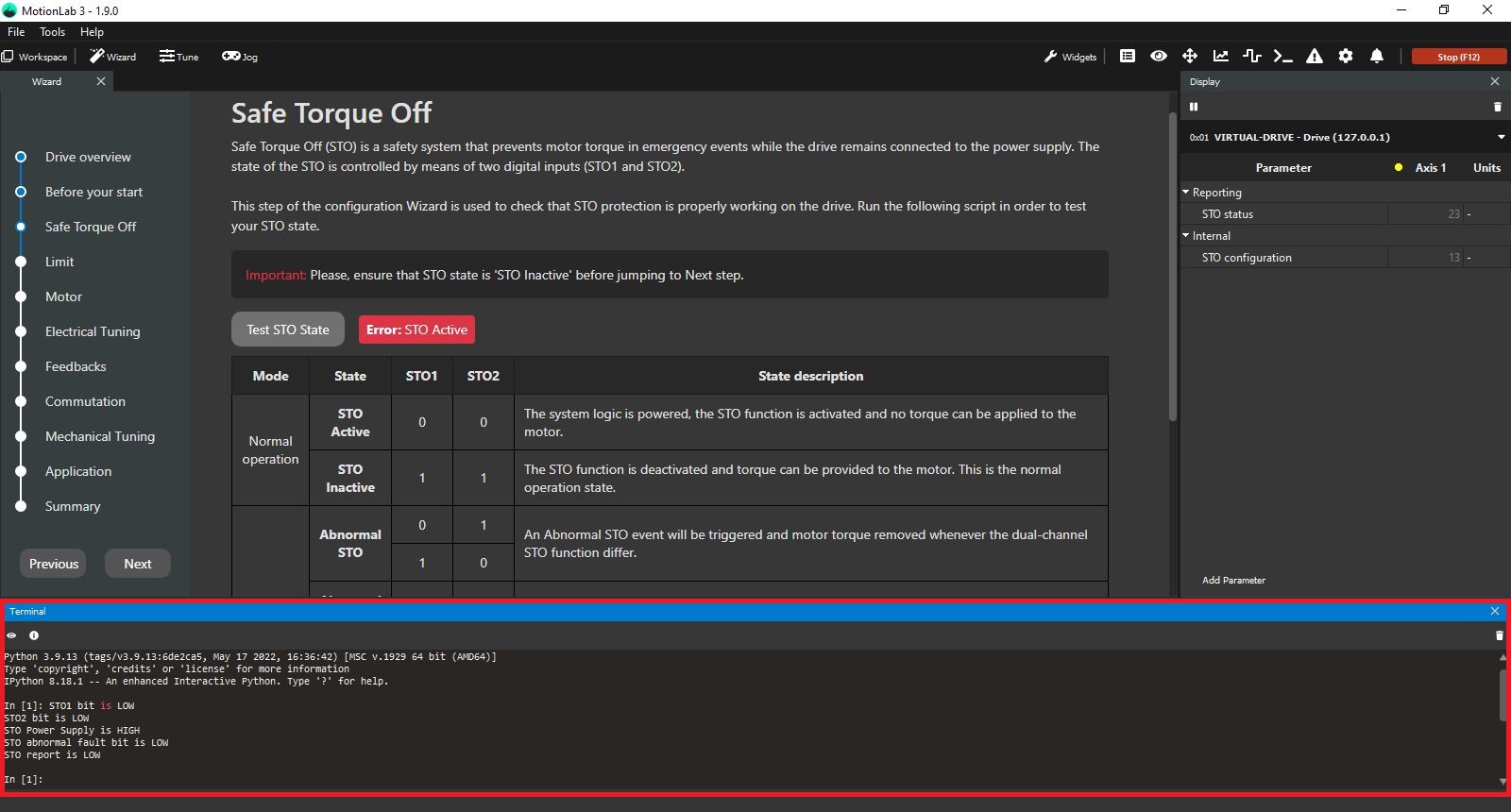
STO failure
STO success
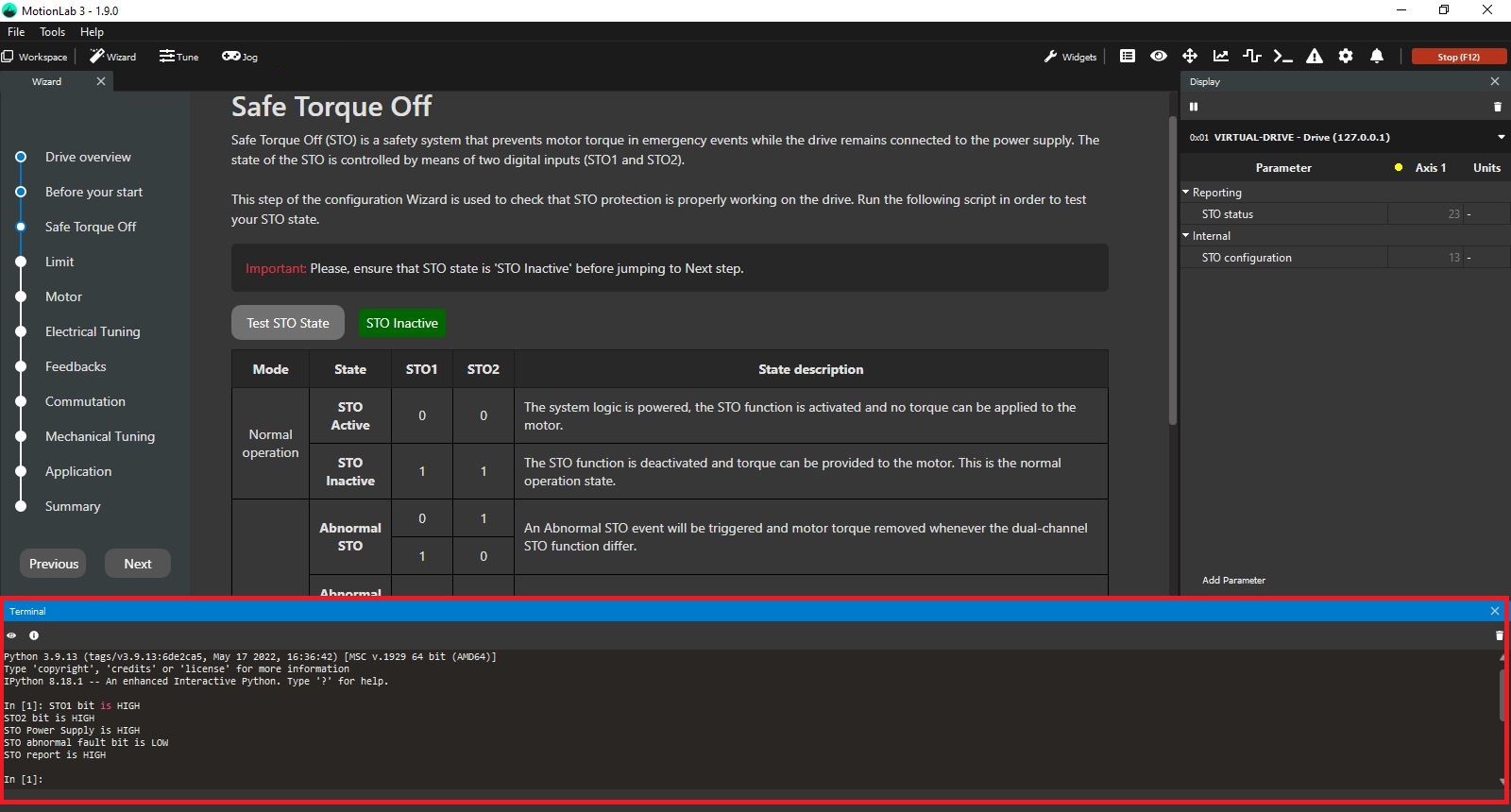
If you are interested, you can check what the different tests in the Wizard are doing by seeing the history messages in the Terminal widget (see green square above)