Absolute Feedback Compensation
Summit servo drives include the ability to compensate absolute feedback inconsistencies caused by mechanical imperfections of the feedback and mechanical components.
Absolute feedback compensation is a LUT (Look-up table) that uses feedback position as a selector of the index. The values from the table are used in a linear interpolation which determines the compensation at each point in the output of the selected absolute feedback (primary or secondary) by the user.
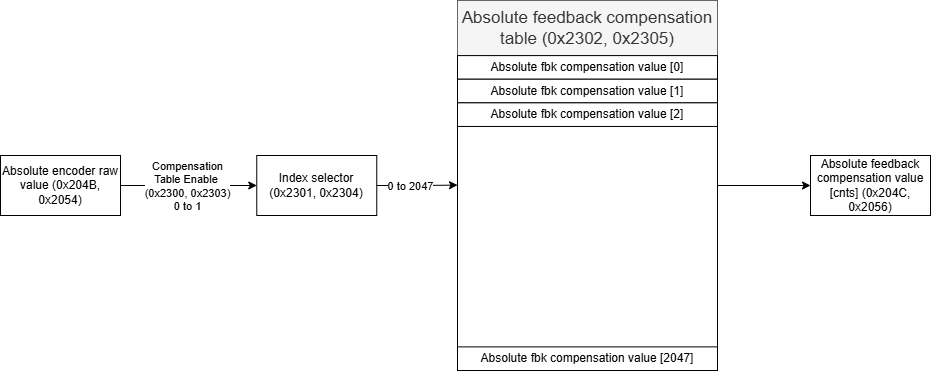
Example of an Absolute Feedback Compensation Table
The number of encoder counts that covers every value of the table is the result of dividing the resolution of the absolute encoder by the length of the compensation table. The compensation table holds 2048 positions from index 0 to 2047. For example, an encoder with a resolution of 21 bits (2097152 counts) and a table length of 2048 indices, each compensation value in the table covers 1024 encoder counts.
Index | Range | Compensation Value | Encoder Count Where Full Compensation Value is Applied |
|---|---|---|---|
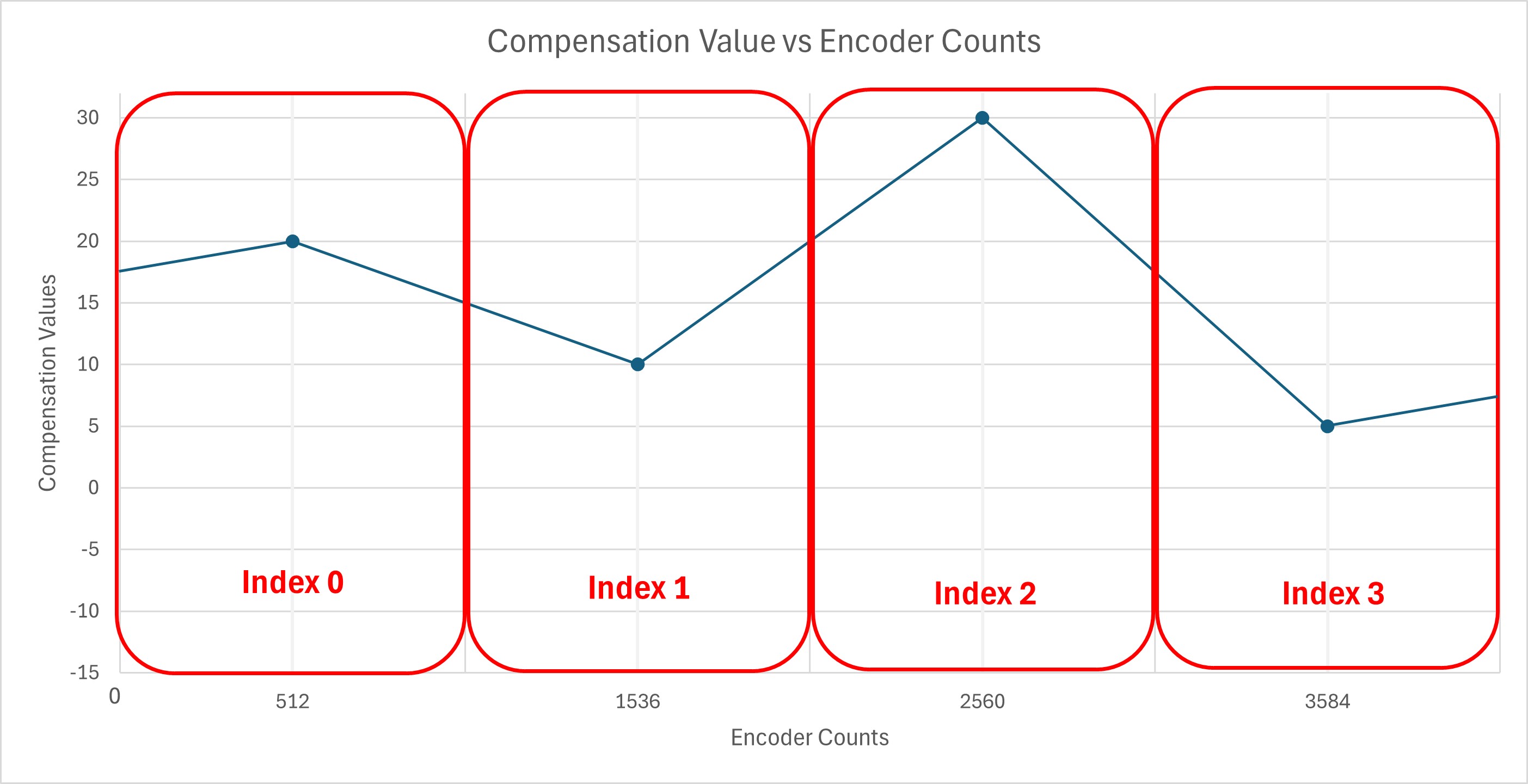
0 | 0 .. 1023 | 20 | 512 |
1 | 1024 .. 2047 | 10 | 1536 |
2 | 2048 .. 3071 | 30 | 2560 |
3 | 3072 .. 4095 | 5 | 3584 |
… | … | … | … |
2047 | 2096128 .. 2097152 | 15 | 2095616 |
The full compensation value is applied at the middle encoder count of that index. The compensation for the other counts in the range is determined by linear interpolation between each middle point. For example, index 0 has a full compensation value of 20 that is applied at encoder count 512. The counts to the right [513, 514, 515…] will be compensated with a value that is determined by the linear interpolation between Index 0 (20) and Index 1 (10). The counts to the left [511, 510, 509…] will be compensated with a value that is determined by linear interpolation between Index 0 (20) and Index 2047 (15).
To control this table multiple registers are defined:
· 0x2300 - Abs feedback 1 compensation table- Enable: Allows enabling/disabling the compensation table compensation for the Primary absolute encoder slave 1.
· 0x2301 - Abs feedback 1 compensation table - Index: Allows selecting the index at which the data will be written / read by the user in the Compensation table for the Primary absolute encoder slave 1.
· 0x2302 - Abs feedback 1 compensation table - Value: Shows the data available in the compensation table for the Primary absolute encoder slave 1 at the index specified. Writing to this parameter also replaces the value in the table with a newer one.
· 0x2303 - Abs feedback 2 compensation table - Enable: Allows enabling/disabling the compensation table compensation for the Secondary absolute encoder slave 1.
· 0x2304 - Abs feedback 2 compensation table - Index: Allows selecting the index at which the data will be written / read by the user in the Compensation table for the Secondary absolute encoder slave 1.
· 0x2305 - Abs feedback 2 compensation table - Value: Shows the data available in the compensation table for the Secondary absolute encoder slave 1 at the index specified. Writing to this parameter also replaces the value in the table with a newer one.
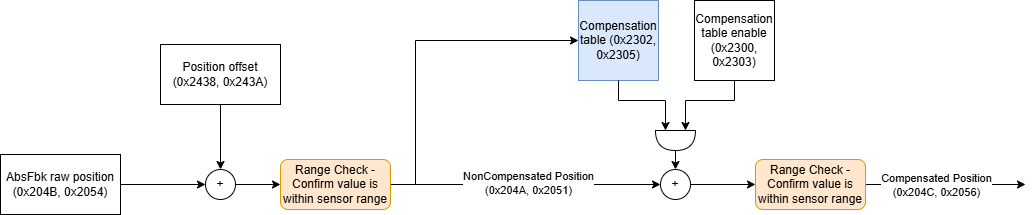
The values of the absolute Primary absolute encoder slave 1 and Secondary absolute encoder slave 1 after the effect of the compensation table offset can be monitored in the following registers:
· 0x204C - Primary Absolute Slave 1 - Compensated Position
· 0x2056 - Secondary Absolute Slave 1 - Compensated Position
To store the values of the compensation table to the NVM a store all process must be performed.
Absolute feedback compensation tables can only be applied to encoders that are hardwired into the drive. These are defined as registers starting with Primary Absolute Encoder 1 or Secondary Absolute Encoder 1. These tables will not work with an encoder in daisy chain.