DEN-*-XCR Communications - Ethercat
The Servo Drive provides access to the EtherCAT field bus system. EtherCAT is an isolated bus suitable for hard and soft real-time requirements in automation technology, test and measurement, and many other applications. The drive can be accessed and configured using any EtherCAT master over EtherCAT connecting the PC to the port 0 (in).
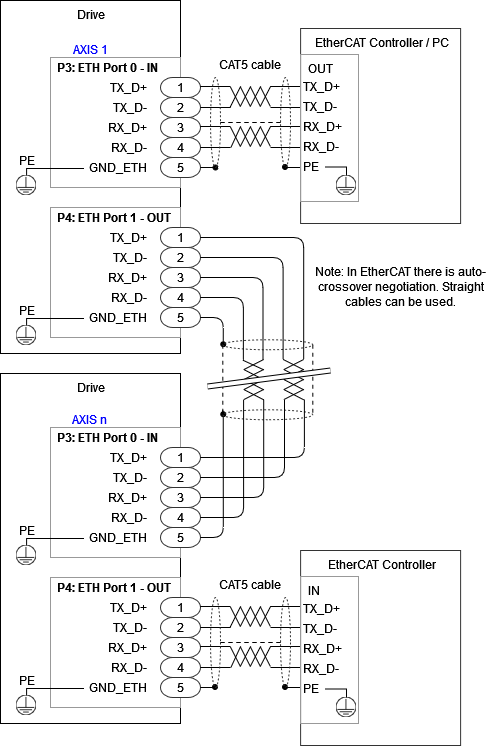
The next figure shows how to connect the drive in an EtherCAT bus. It is recommended to follow the standard IEC 61918-2013 for best practices.
Recommended EtherCAT cables and connectors
The following table shows the recommended connectors and cable colors for EtherCAT according to IEC 61918 Appendix H.
Signal | Function | Corresponding pin on drive | Suggested pinout M12-4 D-coded industrial Ethernet | Suggested pinout RJ45 LAN connector | Cable colour as per TIA-568B | Cable colour as per EN61918 |
|---|---|---|---|---|---|---|
- | Safety inputs / STO inputs | 1, 2, 3 | - | - | - | - |
TX_D+ | Transmit data + | 4 | 1 | 1 | White / Orange | Yellow |
TX_D- | Transmit data - | 5 | 3 | 2 | Orange | Orange |
RX_D+ | Receive data + | 6 | 2 | 3 | White / Green | White |
RX_D- | Receive data - | 7 | 4 | 6 | Green | Blue |
GND_ETH/PE | Connection for the EtherCAT cable shield. This pin is directly connected to the chassis of the drive - PE. It is recommended to use a cable shield termination with the same properties as TE S02-16-R. | 8 | Housing / Shield | Shroud / Shield | Metal | Metal |
Image of the connector | 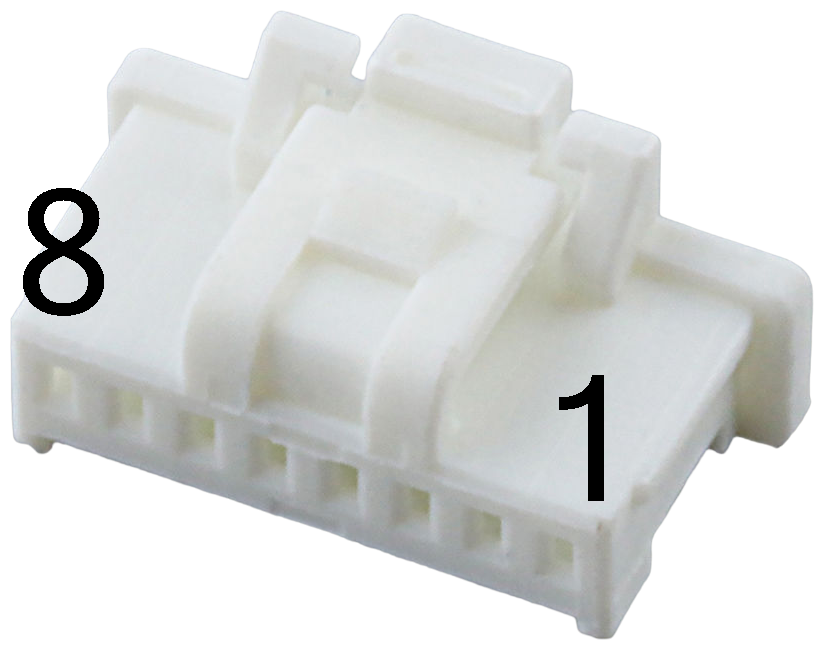 | 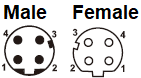 | 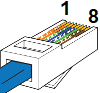 | |||