Everest S Safe EVAL - Communications
The Everest S Safe EVAL provides the following network communication interfaces for configuration and operation.
Part number | Communication Option | J4 connector (ECAT 0) functionality | J3 connector (ECAT 1) functionality | J2 (I/O) connector pins 9, 11 |
|---|---|---|---|---|
EVS-S-EVAL-E | EtherCAT INPUT port 0. Motion Lab 3 can be accessed via Beckhoff Twincat tool from a PC. | EtherCAT OUTPUT port 1 | Not used. |
EVS-S-EVAL-E
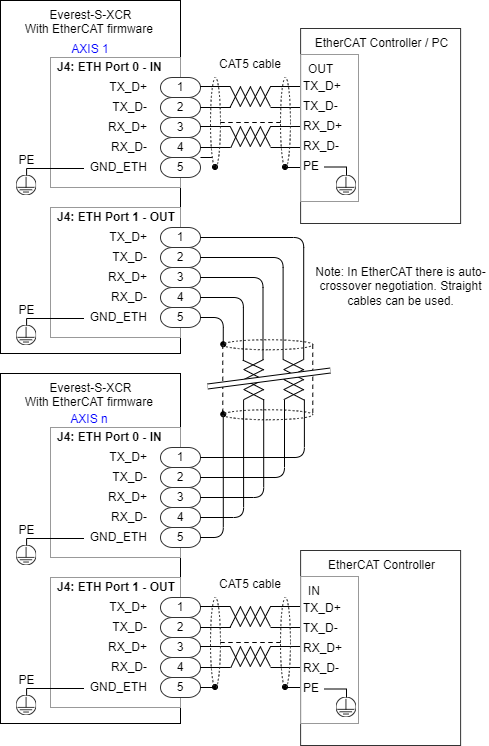
Everest S Safe EVAL Servo Drive provides access to the EtherCAT field bus system. EtherCAT is an isolated bus suitable for hard and soft real-time requirements in automation technology, test and measurement, and many other applications. The drive can be accessed and configured using any EtherCAT master over EtherCAT connecting the PC to the port 0 (in).
The next figure shows how to connect the Everest S Safe EVAL in an EtherCAT bus. It is recommended to follow the standard IEC 61918-2013 for best practices.
Recommended EtherCAT cables and connectors
The following table shows the recommended connectors and cable colors for EtherCAT according to IEC 61918 Appendix H.
Signal | Function | Corresponding pin on Everest S Safe EVAL | Pin for RJ45 | M12-4 D coded | M8-4 D coded | Cable colour as per TIA-568B | Cable colour as per EN61918 |
|---|---|---|---|---|---|---|---|
TX_D+ | Transmit data + | 1 | 1 | 1 | 1 | White / Orange | Yellow |
TX_D- | Transmit data - | 2 | 2 | 3 | 4 | Orange | Orange |
RX_D+ | Receive data + | 3 | 3 | 2 | 2 | White / Green | White |
RX_D- | Receive data - | 4 | 6 | 4 | 3 | Green | Blue |
- | Not used, leave these wires unconnected. | - | 4 | - | - | Blue | |
- | - | 5 | - | - | White / Blue | ||
- | - | 7 | - | - | White / Brown | ||
- | - | 6 | - | - | Brown | ||
Screen | Screening | 5 | Housing | Housing | Housing | Metal | Metal |
Image of the connector |  | 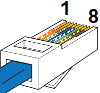 | 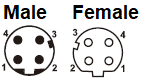 | ||||
Ethernet over EtherCAT (EoE) Protocol - Used by Motion Lab 3
Everest S Safe EVAL Servo Drive supports Ethernet over EtherCAT protocol. This protocol encapsulates Ethernet frames into EtherCAT packets allowing to establish a communication between standard Ethernet clients and EtherCAT devices over an EtherCAT network in a transparent way.
Thanks to this protocol is possible to configure a specific Everest S Safe EVAL of the network using Motion Lab without requiring modifying the wiring of the installation.
The next figure shows how to connect the Everest S Safe EVAL in an EtherCAT bus and how to establish communication with Motion Lab 3 to configure the drive. EtherCAT controller/master needs to provide EoE capability and include two different Network Interfaces Cards (NIC). If your computer has no Ethernet port, you can use an Ethernet - USB adapter, like TeckNet HU043.
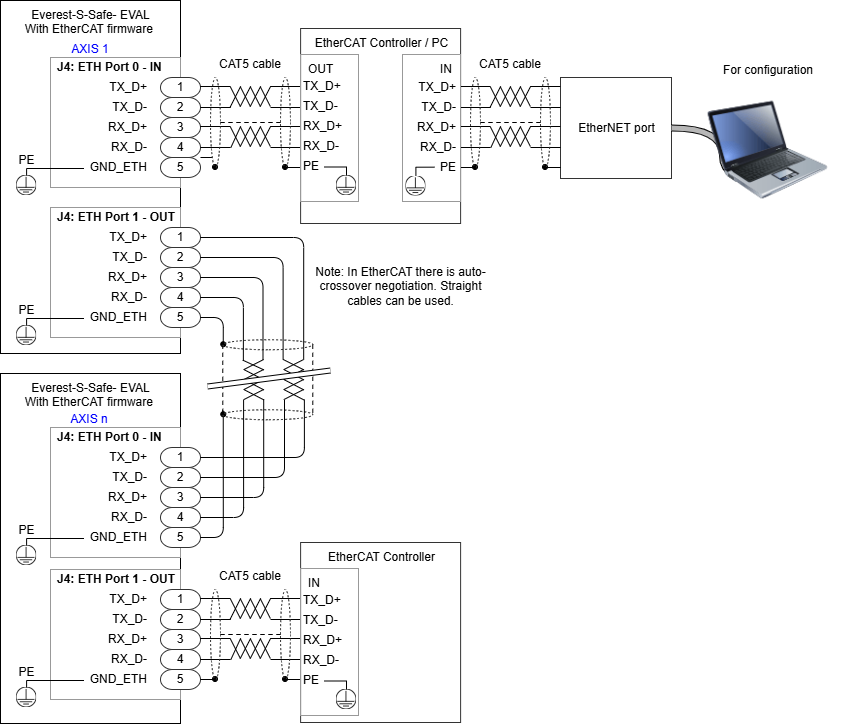
It is also possible to install Motion Lab 3 and EtherCAT Controller (i.e. Beckhoff TwinCAT) in the same PC reducing the number of needed NIC.
EoE and TwinCAT
You can find more information on how to configure EoE on Beckhoff TwinCAT in the following link: https://novantamotion.atlassian.net/wiki/pages/createpage.action?spaceKey=MOT3&title=Connect%20through%20EtherCAT