Motion Instructions
Motor Function
| Function | Properties | Values | Comments |
|---|---|---|---|
| MOTOR | Motor | On / Off | Use the MOTOR function to enable the servo drive and perform a specified motion. |
Example :
Enable motor and servo drive:

Position Command
| Function | Properties | Values | Comments |
|---|---|---|---|
| POSITION | Mode | Absolute / Relative | Absolute displacements are executed related to zero position defined by Homing. Relative displacements use as reference the current position. |
| Target position | Constant / variable | It can use any readable variable in the controller. | |
| Target value | Position value in counts | Check encoder counts to get the right conversion. | |
| Profile velocity | Velocity in counts /s |
Check motor rated speed and encoder counts to get the right conversion. | |
| Profile Acceleration | Acceleration in counts /s2 | ||
| Profile deceleration | Deceleration in counts /s2 | ||
| Setpoint mode | Immediate / Queue | ||
| Wait mode | Target reached / none | The setting of the WAIT MODE determines if the program will wait for the move to be finished, or if the program will continue executing the next instruction. |
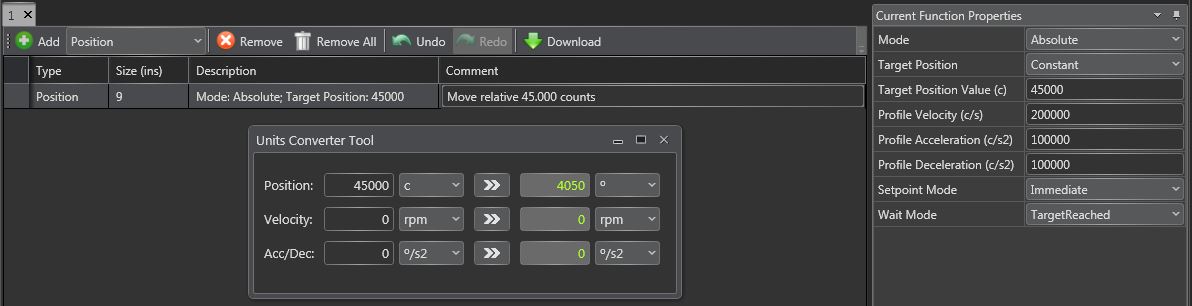
Example:
Move 45,000 counts from current position and wait for the move to be finished. In this example a rotary motor has attached an incremental encoder with 4,000 CPR (45,000 counts / 4,000 CPR * 360º = 4,050 º).
Velocity Command
| Function | Properties | Values | Comments |
|---|---|---|---|
| VELOCITY | Target Velocity | Constant / variable | It can use any readable variable in the servo drive. |
| Target Velocity value | Velocity value in counts/ s | Check encoder counts or calculator to get the right conversion. | |
| Profile Acceleration | Acceleration in counts /s2 |
Check motor rated speed and encoder counts to get the right conversion. | |
| Profile deceleration | Deceleration in counts /s2 | ||
| Wait mode | Target reached / none | The setting of the WAIT MODE determines if the program will wait for the move to be finished, or if the program will continue executing the next instruction. |
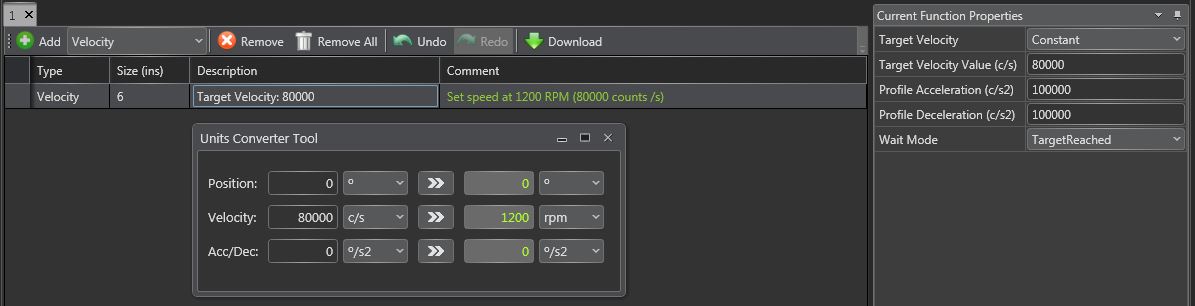
Example:
Set velocity at 1,200 RPM and wait for the speed to be reached. In this example the rotary motor has attached an incremental encoder with 4,000 CPR.
(80,000 counts / 4,000 CPR * 60 s = 1,200 RPM)
Torque/Force Command
| Function | Properties | Values | Comments |
|---|---|---|---|
| FORCE | Target Force / Torque | Constant / variable | It can use any readable variable in the servo drive. |
| Target value | Force/ Torque value in 0/00 of Rated value | Check motor or actuator rated torque or force. The target value is expressed in 0/00. | |
| Profile slope | Force increase in 0/00/s | Defines force slope to reach the target | |
| Wait mode | Target reached / none | The setting of the WAIT MODE determines if the program will wait for the move to be finished, or if the program will continue executing the next instruction. |
Example:
Set output force of axis at 50% or rated value.

Homing Command
| Function | Properties | Values | Comments |
|---|---|---|---|
| HOMING | Method |
| Use the Homing function to take the axis to its reference position(home). Up to eight different parameters are responsible for determining how the home cycle is performed, depending on the method selected. By choosing a homing method, the following behavior is determined: The homing signal (positive limit switch, negative limit switch, home switch), the direction of actuation and where appropriate, the position of the index pulse. |
| Wait mode | Target reached / none | The setting of the WAIT MODE determines if the program will wait for the move to be finished, or if the program will continue executing the next instruction. | |
| Direction | Positive / Negative | Displacement direction. | |
| Acceleration | In counts / s2 | This parameter establishes the acceleration used for all accelerations and decelerations in homing methods. | |
| Velocity for End Stop | In counts / s | Two search speeds are used during the typical homing process, a fast one to locate the switch position or mechanical limit and a very slow one to find the encoder index pulse. | |
| Velocity for Index Search | In counts / s | ||
| Force for End Stop | 0/00 of rated force | Max force to apply during homing sequence. | |
| Timeout | In ms | Timeout to occur in case the servo drive does not complete the homing. | |
| Home Offset | In counts | This value indicates the configured difference between the zero position for the application and the machine home position (found during homing). |
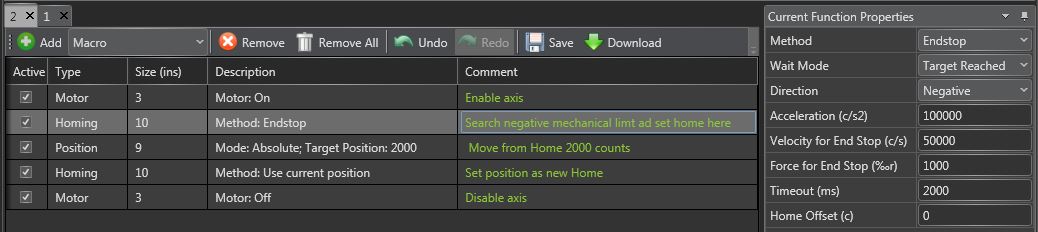
Example:
Homing center of travel: using a linear actuator, this macro searches negative mechanical limit then moves 2,000 counts and sets this point as new home (full stroke is 4,000 counts).
- Motor ON enables the axis
- Homing EndStop moves the axis until reaching the negative mechanical limit and sets this position as Home.
- Move Absolute displaces the axis 2,000 counts
- Homing current position
- Motor Off disables the axis
Oscillate Command
| Function | Properties | Values | Comments |
|---|---|---|---|
| OSCILLATE | Amplitude | counts | Peak amplitude |
| Frequency | Hz | Check motor / actuator mechanical limits |
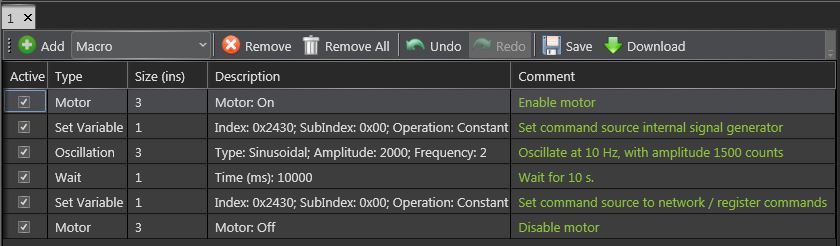
Example:
This macro triggers a 10 Hz oscillation during 10 s and 1,500 counts amplitude.
- Motor ON enables the axis
- Set command source to internal signal generator ( register 0x02430 = 6).
- Oscillate 10 Hz, 1,500 counts amplitude
- Wait for 10 s
- Set command source to network ( register 0x02430 = 0).
Oscillate
Oscillate instruction requires to first change command source to internal signal generator. The oscillation starts from the current position, therefore is necessary to check first that there is enough stroke / length in both sides to perform the displacement.