Motor
The Motor view is used to configure the parameters of the motor conforming the actuator.
Depending on the Motor Type, the information available for editing will change in the Motor Parameters area. Check the motor datasheet to determine the appropriate values.
| Parameter | Motor types | Description |
|---|---|---|
| Phase2Phase inductance | Rotary, Linear | Motor phase to phase inductance in mH |
| Phase2Phase resistance | Rotary, Linear | Motor phase to phase winding resistance in mOhm |
| Phase inductance | Stepper | Motor phase inductance in mH |
| Phase resistance | Stepper | Motor phase winding resistance in mOhm |
| Stroke | Linear | Motor stroke in mm |
| Rated torque | Rotary | Motor rated torque in mNm |
| Holding torque | Stepper | Holding torque when the motor is at standstill. |
| Continuous force | Linear | Motor continuos force in mN |
Torque constant | Rotary | Motor torque contant |
| Force sensitivity | Linear | Force sensitivity of the motor |
| Continuous current | Rotary, Linear | Motor continuous current rating in mA peak of sine wave |
| Peak current | Rotary, Stepper | Motor peak current rating in mA peak of sine wave |
| Current@Force peak | Linear | Motor current in mA peak of sine wave at force peak |
| Peak time | Rotary, Linear | Peak time duration in ms |
| Max permissible speed | Rotary, Linear | Motor maximum permissible rated speed |
| Motor pair poles | Rotary Brushless | Number of motor pole pairs per revolution (for rotary brushless motors) |
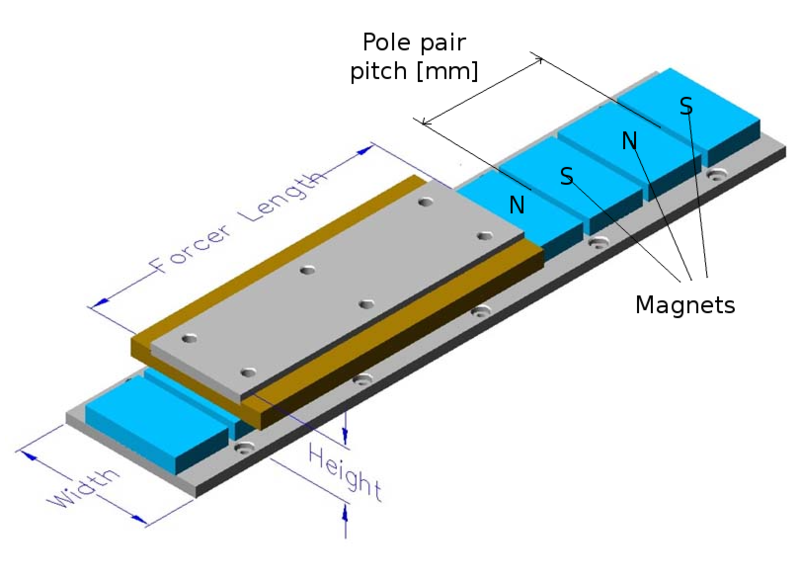
| Pole pitch | Linear Brushless | Pole pitch of the linear brushless motor in mm (this equals 2x pole pitch).
|
| Full step/revolution | Stepper
| Number of full steps per mechanical revolution. For example a 1.8º resolution stepper motor will have 200 steps per revolution (360º/1.8º). |
| Step mode | Stepper | Select the excitation mode for the step motor among Full Step, Half Step or Microstepping (1/4, 1/8, 1/16, 1/32). In full step operation, the motor will move through its basic step angle, i.e., a 1.8° step motor takes 200 steps per motor revolution. In half-step, the motor will move though half the basic step angle. Microstepping is a technique that increases motor resolution by controlling both the direction and amplitude of current flow in each winding. Current is proportioned in the windings according to sine and cosine functions. Microstepping can divide a motor’s basic step up to 32 times. Microstepping improves low speed smoothness and minimizes low speed resonance effects. |
| Run current | Stepper | Current applied to the phases of the motor when it is moving in mA |
| Standby current | Stepper | Current applied to the phases of the motor in standby situation in mA |
Related parameters will appear with a link diagram next to their values. They can be entered manually or calculated automatically through the formula relating them.
| Linked parameters |  |
| Unlinked parameters |  |
Some motor parameters are used for auto-calculators of other settings so it is important to set them accurately.
Foldback
The foldback feature protects both the motor and the drive from overheating. Two current foldback algorithms run in parallel in the drive: the drive foldback algorithm and the motor foldback algorithm. Each algorithm uses different sets of parameters and uses its own foldback current limit. The overall foldback current limit is the minimum of the two at any given moment.
Foldback is not the same as current limits. Instantaneous current limits for the drive are set by the Max system current in the system Limits view in MotionLab. The foldback algorithms may reduce the current output to the motor in spite of the current limit settings.
Drive Foldback
The drive foldback algorithm monitors current feedback; since this is a monitoring function, the drive foldback parameters are not user configurable.
Setting up motor foldback
The parameter entries required for the drive to apply motor foldback protection properly are Cycle Time, Peak current of the motor, and continuous current of the motor. These values are used to setup the algorithm for motor foldback.