Profiler
The profiler is in charge of continuously generating the position, velocity or torque references to reach the final target values according to the user specified limits.
The available parameters for configuration are:
| Parameter | Description |
|---|---|
| Profile velocity | Indicates the configured velocity normally attained at the end of the acceleration ramp during a profiled motion. It is valid for both directions of motion. |
| Profile acceleration | Indicates the configured acceleration used by the profiler. If this acceleration is higher than Maximum acceleration defined in the limits view it will be restricted by the profiler. |
| Profile deceleration | Indicates the configured deceleration. If this deceleration is higher than Max deceleration it will be restricted by the profiler. |
| Torque slope | Indicates the configured rate of change of torque. |
Ther are four operating modes that use the profiler: Profile torque, profile velocity , profile position and interpolated position.
Profiler in profile torque
The profile torque profiler is implemented according to the following structure:
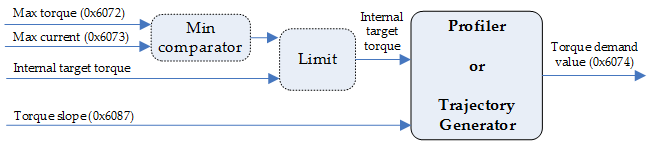
Actual torque and current are compared against their maximum values, usually related to the actuator datasheet. Afterwards, the internal target torque is limited by the system limits, if applicable. Finally, the torque demand value is calculated with this internal target torque and the defined torque slope, to avoid applying excessive rotational acceleration that could damage the mechanical system.
Profiler in velocity mode
The profile velocity profiler is implemented according to the following structure:
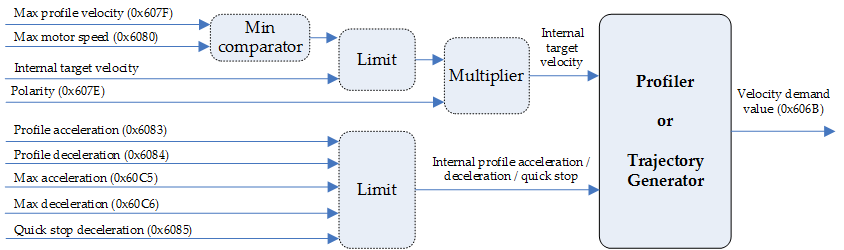
Actual velocity and motor speed are compared against its mechanical limits, to avoid damaging the mechanical parts for driving the actuator out of the allowed mechanical range. Target velocity, taking into account polarity, is limited by the system limits, and the internal target velocity is obtained. On the other hand, profile parameters such as acceleration/deceleration, both normal and quick-stop, are compared against their limits. At last, the actual velocity demand is calculated through the previous magnitudes.
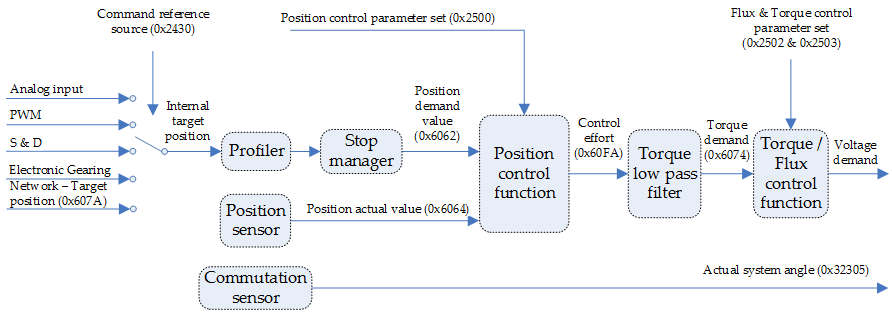
Profiler in position mode
The profile position profiler is implemented according to the following structure:
Profiler in interpolated position mode
The profiler used in interpolated position mode is a simplification of the profiler used in profile position mode, with the exception that the interpolated position mode does not take into account the maximum acceleration and velocities of the system. The structure is presented below.
