Limits
These steps are used to design the safety limits in order to protect the motor. All these parameters are set in the Control widget.
Power Stage Temperature Limits
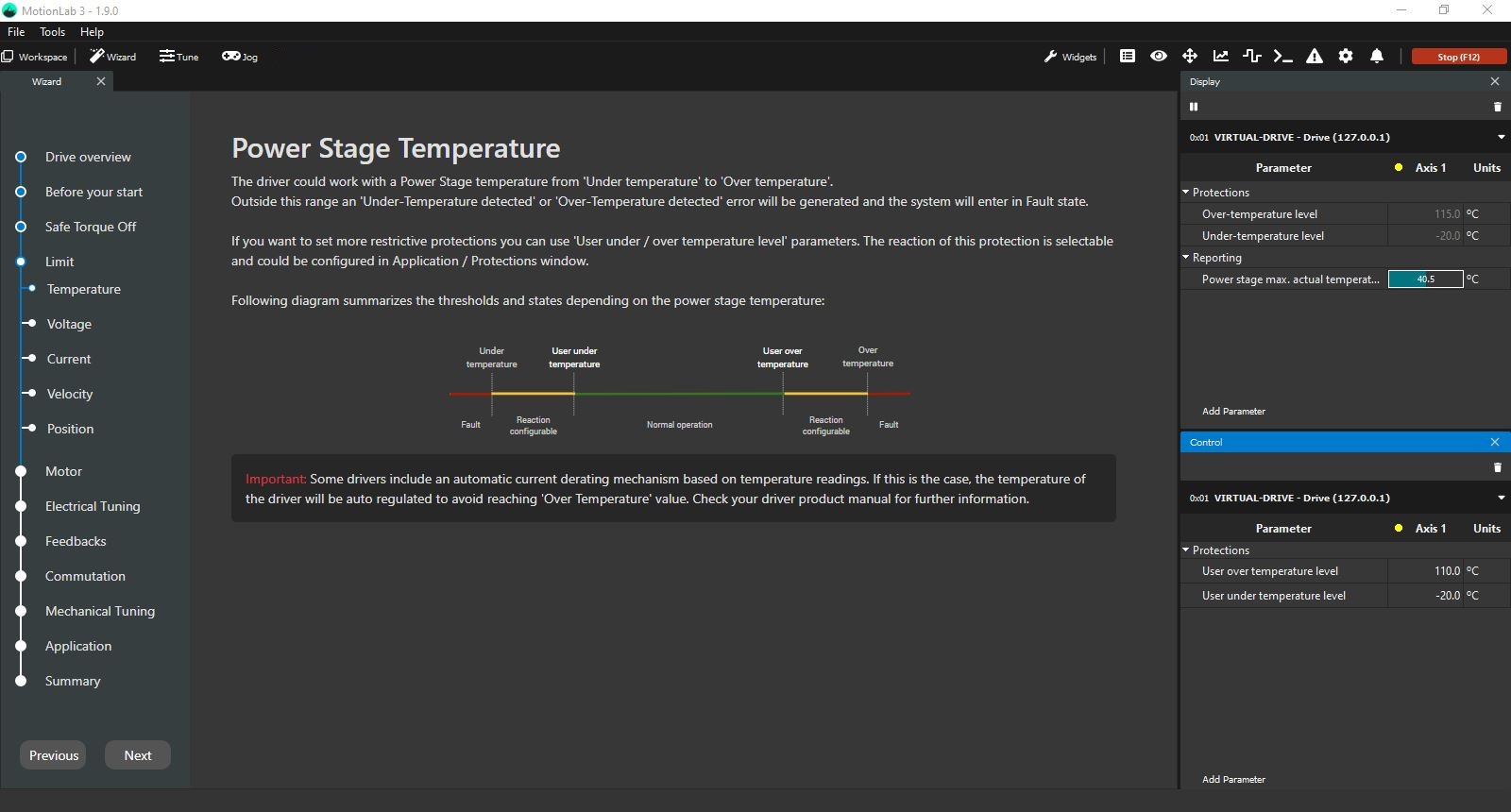
If you are interested in learning more about the parameters configured in this step, please refer to the firmware manual documentation: Drive protections
Voltage Limits
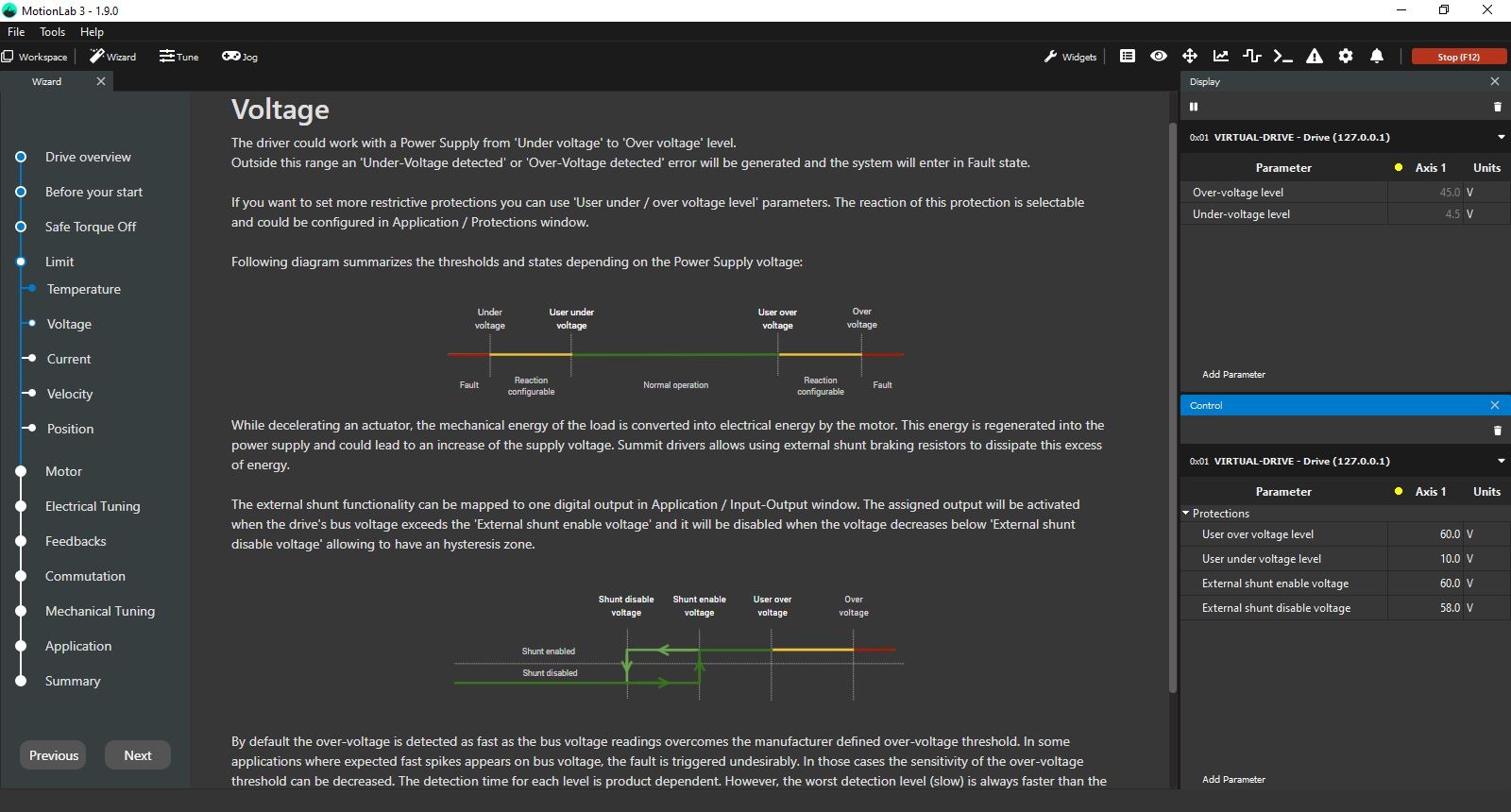
If you are interested in learning more about the parameters configured in this step, please refer to the firmware manual documentation: Drive protections
Current Limits
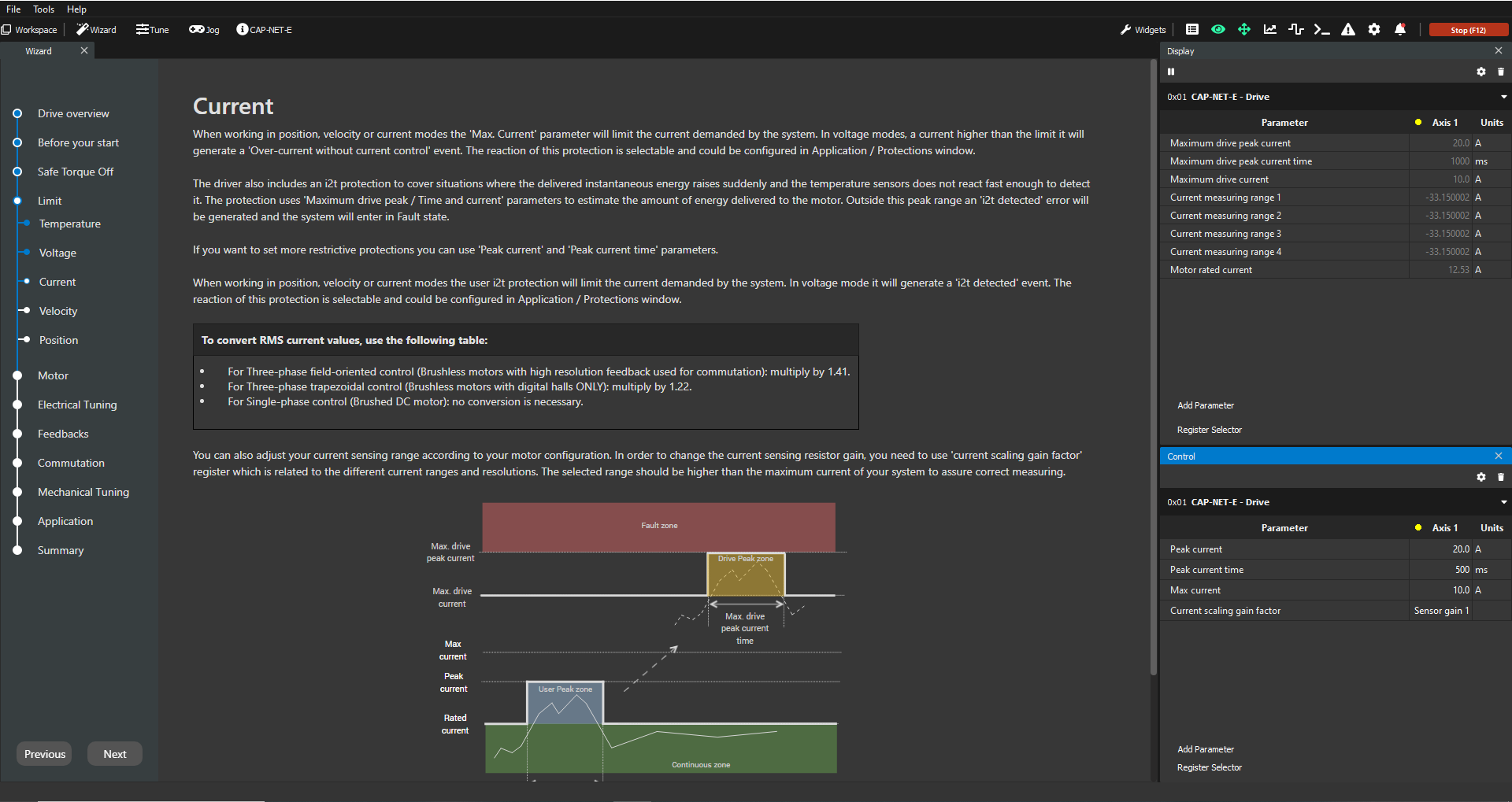
If you are interested in learning more about the parameters configured in this step, please refer to the firmware manual documentation: Drive protections
Parameters to configure
Max. current → this protection limits current set-points (in A) injected to the current control loops above the max current level.
Peak current → peak current setting (in A) of the motor used in the i2t overloading algorithm (more on the i2t algorithm here)
Peak current time → peak current time setting (in ms) of the motor used in the i2t overloading algorithm (more on the i2t algorithm here)
Velocity Limits
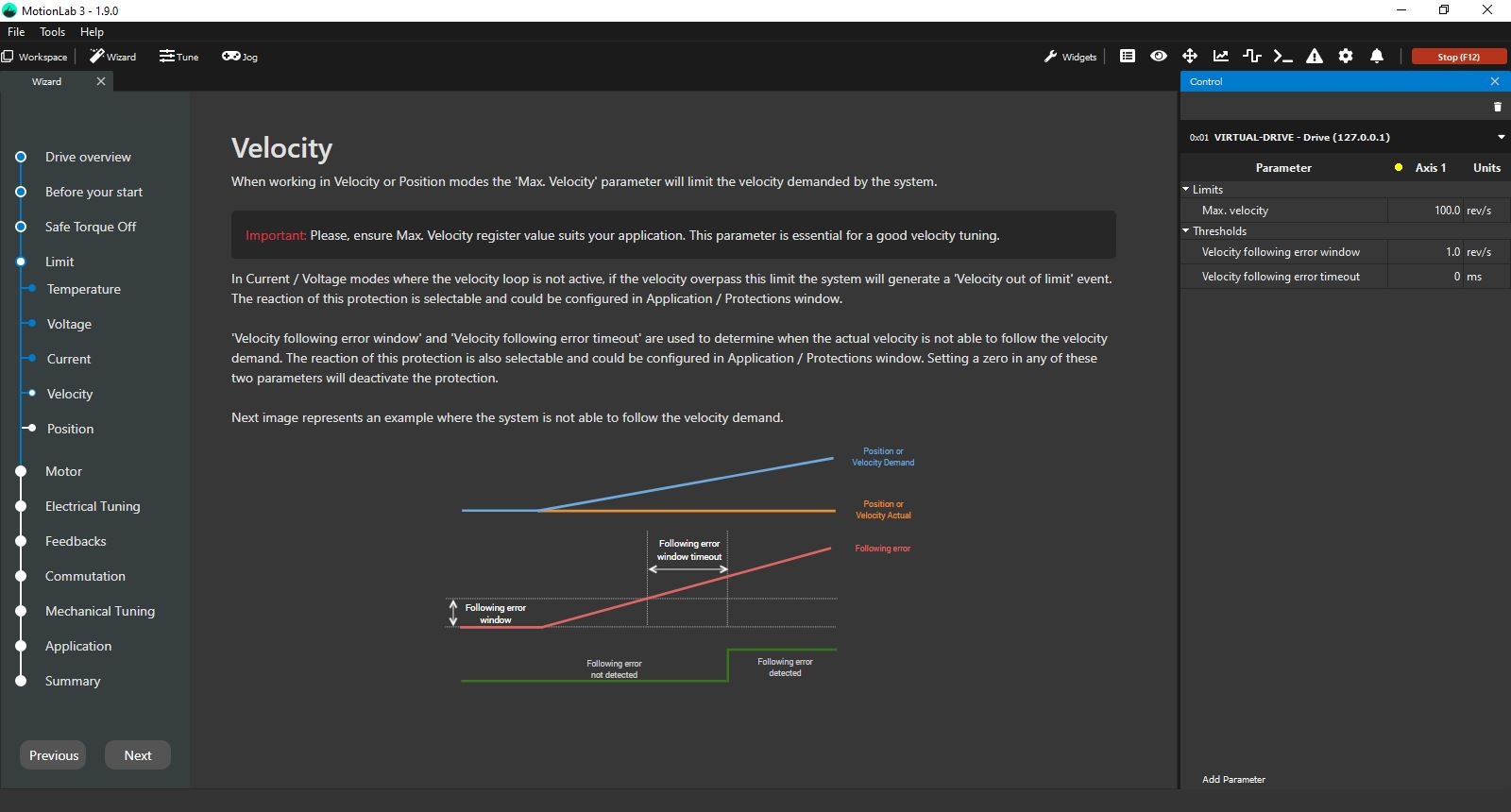
If you are interested in learning more about the parameters configured in this step, please refer to the firmware manual documentation: Velocity modes
Position Limits
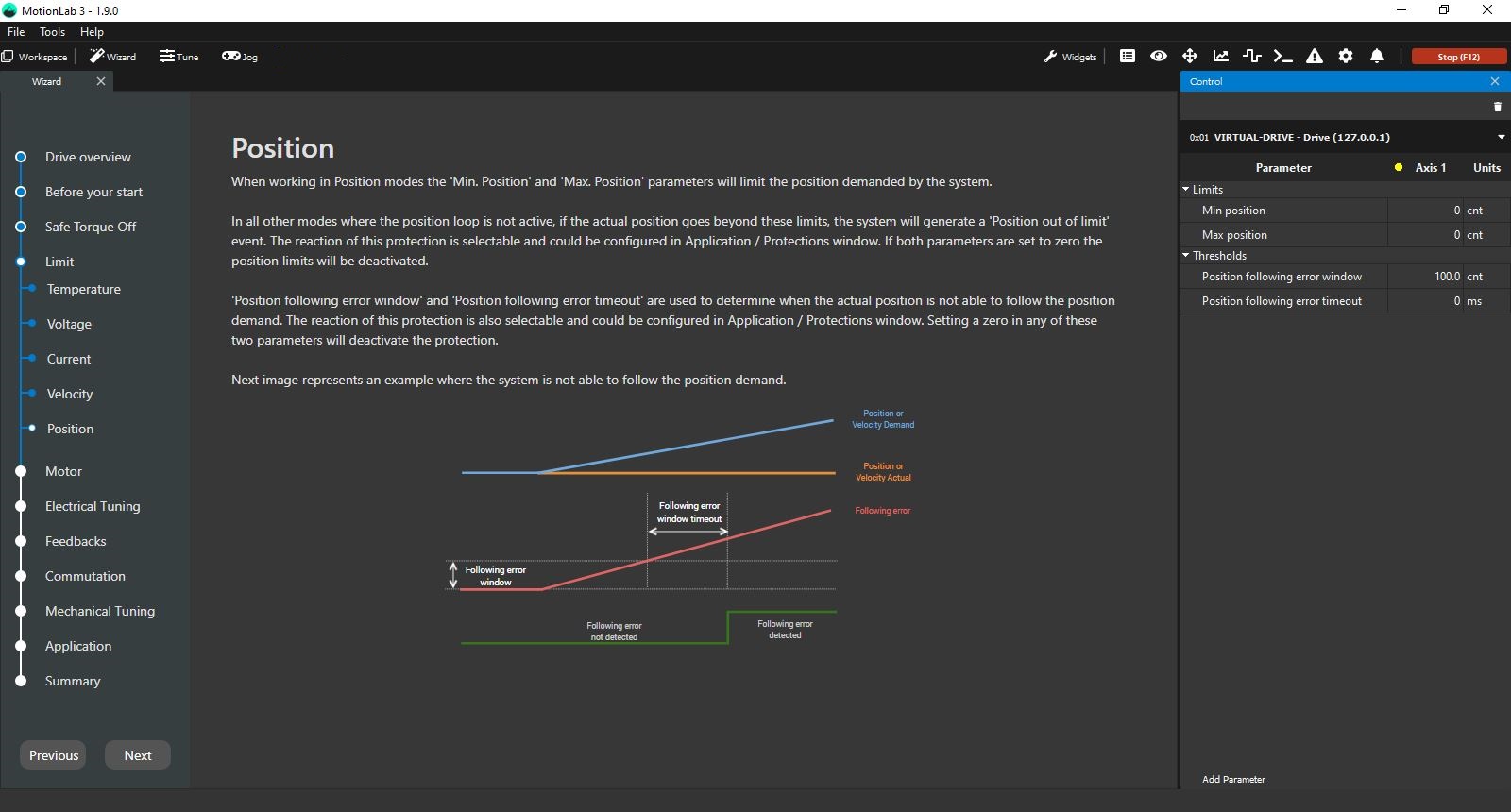
If you are interested in learning more about the parameters configured in this step, please refer to the firmware manual documentation: Position modes
Once these protections have been properly set, you can continue to the next step.