BiSS-C slave 2 (daisy chain)
Summit servo drives support two BiSS-C feedbacks connected to the Primary interface. These feedbacks can be connected in daisy-chain or in Dual BiSS-C (two positions in the same BiSS-C frame). This section describes how to configure the second feedback.
BiSS-C is a serial protocol that offers a series of advantages. These (amongst others) are:
It has a standard protocol definition
Contains error and warning bits and provides CRC checking
It allows for daisy chain operation.
More information about the BiSS-C protocol can be found below:
BiSS-C BP3 profile description
BiSS-C BP1 profile description (Not recommended for new designs. Please refer to BiSS Profile 3).
The following picture shows an example of a BiSS-C daisy chain frame. The example frame is divided into two segments, each containing data of each separate feedback.

Note
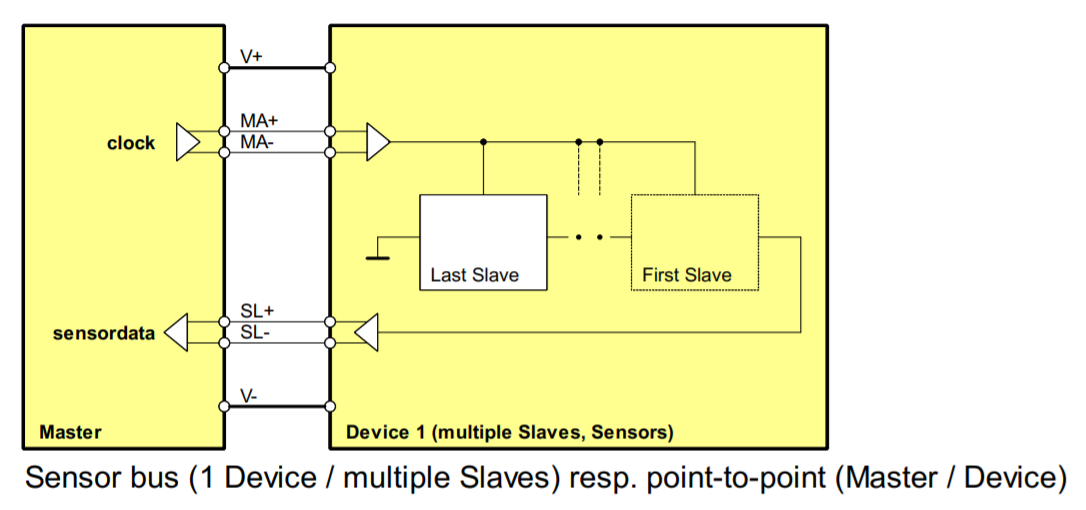
Summit servo drives only support the BiSS-C unidirectional and point to point topology (shown below). The ACK, Start, and CDS bits are automatically taken into account by the drive
Daisy chain operation for SPI Drives
Daisy chain operation is supported in BiSS-C. The BiSS-C slave 2 encoder module is completely dependent on the BiSS-C slave 1 / Primary SSI encoder. To be able to use this feedbacks in a daisy chain, both feedbacks (this one and BiSS-C slave 1 / Primary SSI encoder) need to be configured separately, both selected as feedback somewhere, and the number of feedbacks in the chain needs to be specified.
When using daisy chain, the total frame size is made up of the START and CDS bits plus the BiSS-C slave 1 / Primary SSI encoder frame size and the BiSS-C slave 2 frame size combined. This combination must fit the maximum frame size.
Since the total frame size includes the START and CDS bit, the meaningful data that can be captured in daisy chain configuration is limited to 62 bits
A set of parameters are available to the user to adapt the slave absolute interface to the different frame types:
Frame size. Indicates the total number of bits of the second slave's frame. These include position bits, special bits, warning, error and CRC bits, etc.
0x400 - Primary Absolute Slave 2 - Frame size
ACK, START and CDS bits should not be included in this parameter
Please be aware that the maximum frame size depends on the Actual refresh rate and the Baudrate. Larger frame sizes (over 40 bits) may require higher baudrates.
Error tolerance. The drive can detect errors in frames, such as the error bit and CRC in the BiSS-C protocol. If an incorrect frame is detected, it is dropped and the drive keeps the last read as current position actual. However, if too many followed errors are detected, the drive generates a fault and stops the operation. This register specifies the number of errors accepted before generating the fault.
0x401 - Primary Absolute Slave 2 - Error tolerance
Setting a 0 value will ignore any error from the encoder.
Polarity. Indicates the direction of rotation of the encoder. 0 value applies standard polarity (read directly from the feedback) and a value different than 0 reverses the polarity.
Frame type. Indicates the format of the received frame. This parameter allows parsing frames in a specific way. For example, the BiSS-C BP3 profile frame type will assume there are CRC, error and warning bits and will use them to detect errors in the frame
0x404 - Primary Absolute Slave 2 - Frame type
For unsupported frame types, use raw or raw gray modes. These modes allow reading the position from any frame type without processing special bits such as CRC or error flags.
Note
Frame type 3 implements the BiSS-C BP3 profile. By selecting this frame type, the first 8 bits will automatically be used for CRC and error checking, since a BP3 BiSS-C frame is assumed. More information about this profile can be found here
With BiSS-C BP3 type selected, frames with errors will be discarded.
Position bits. Indicates the number of bits used for position readings.
0x405 - Primary Absolute Slave 2 - Position bits
Note
The device calculates its own multi-turn data to allow covering the whole position variable range. Use position range configuration if the systems needs to work only in the absolute encoder range
Single-turn bits. Indicates the number of position bits that represent single-turn information.
0x406 - Primary Absolute Slave 2 - Single-turn bits
This information is used by the drive to compute the angle commutation properly. For multi-turn absolute encoders, this information gives the reference of 1 mechanical revolution to the drive.
For single-turn absolute encoders, position bits must be equal to single-turn bits.
Note
Writing the following parameters will cause the software multi-turn (multi-turn part calculated by the driver) to be reset to 0: Frame size, Polarity, Frame type, Position bits, Single-turn bits, Position start bit and Position offset
Position start bit. Defines how many bits the position information is displaced from the LSB in the serial absolute feedback frame.
Position offset. Adds an offset to the read encoder position (after polarity has been applied). Negative values on this parameter shift the overall position in the negative direction and positive values shift it to the positive direction
Position. Shows the encoder position value taking into account the polarity, position offset and (if available) software multi-turn.
Full frame. Contains last received frame including special bits, for debugging purposes
How the data is parsed
