0x2501 - Velocity control parameters set
Index | Sub Index | Name | Data Type | Acc. | Pdo Map. | NVM | Value range | Default value | Units |
|---|---|---|---|---|---|---|---|---|---|
0x2501 | 0x01 | Proportional constant | UINT32 | RW | No | Yes | UINT32 | 4000 | ‰ rated torque / (increments * s) |
0x2501 | 0x02 | Integral constant | UINT32 | RW | No | Yes | UINT32 | 50 | ‰ rated torque / (increments * s2) |
0x2501 | 0x03 | Derivative constant | UINT32 | RW | No | Yes | UINT32 | 0 | ‰ rated torque / increments |
0x2501 | 0x04 | Integral antiwindup constant | UINT32 | RW | No | Yes | UINT32 | 0 | increments / (‰ rated torque * s) |
0x2501 | 0x05 | Acceleration feedforward constant | UINT32 | RW | No | Yes | UINT32 | 0 | (‰ rated torque * s2) / increments |
0x2501 | 0x06 | Integral limit | UINT32 | RW | No | Yes | UINT32 | 10 | ‰ rated torque |
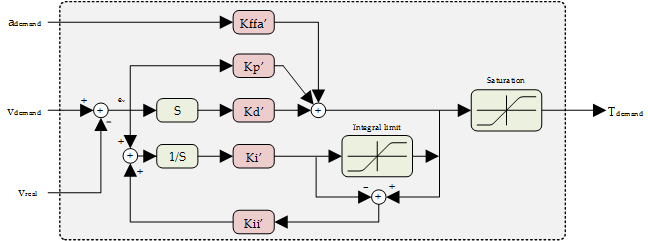
The filter implemented in the velocity control loop is a parallel PID with acceleration feedforward and also with antiwindup control. Next Figure shows a diagram of the loop.
The equivalent equation of control loop is the following one (to simplify the anti-windup term has been eliminated):
The equation could be expressed in digital space as following:
The simplified equivalent equation of the implemented PID (without feedforwards) is:
Where:
Due to optimization of computational time we consider the Tsampling included into the constants value. We also include an additional scaling value to give more resolution. Therefore, the constants sent to the controller will be related with the internal ones in the following way:
Where
Giving a final scaling of
The integral limit is also scaled as stated in the following equation:
So, if we want a constant Kp' with a 0.4 value we must set a 26214 into register 0x2500 SubIndex 1 that corresponds to the Kp constant in position loop.
Any theoretical and/or empirical adjustment (Ziegler-Nichols, Tyreus-Luyben, etc) must be based on the use of the internal constant of the loop (Kp', Ki', Kd', etc.)
This object defines the constants of the velocity control loop.
For further information about meaning of each parameter see Position control parameters set.