0x250B - Following error extra parameters
Index | Sub Index | Name | Data Type | Acc. | Pdo Map. | NVM | Value range | Default value | Units |
|---|---|---|---|---|---|---|---|---|---|
0x250B | 0x01 | Vel. following error window | UINT32 | RW | Yes | Yes | UINT32 | 0xFFFFFFFF | c/s |
0x250B | 0x02 | Vel. following error time out | UINT16 | RW | Yes | Yes | UINT16 | 100 | ms |
0x250B | 0x03 | Vel. following error actual value | INT32 | RO | Yes | No | INT32 | - | c/s |
0x250B | 0x04 | Vel. following error option code | UINT8 | RW | No | Yes | 0 or 1 | 1 | - |
| 0x250B | 0x05 | Pos. following error option code | UINT8 | RW | No | Yes | 0 or 1 | 1 | - |
This object defines additional functionalities related to following error. It introduces the following error in velocity, and following error option codes which allow to select the reaction of the drive in front of a following error event.
SubIndex description:
- 0x01 (Vel. following error window): This subindex indicates the configured range of tolerated velocity values symmetrically to the velocity demand.
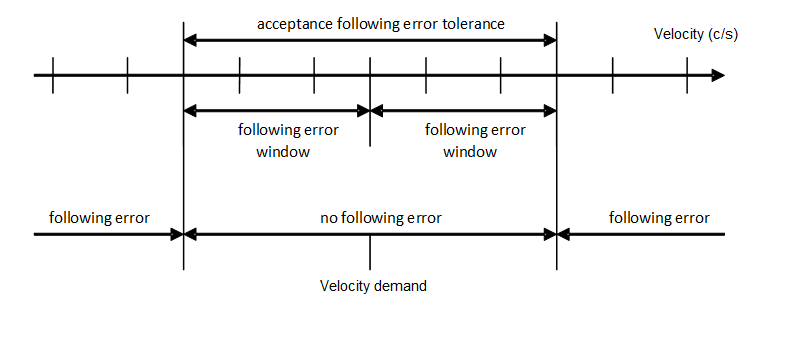
- 0x02 (Vel. following error time out): This subindex indicates the minimum time that actual velocity must be out of following error window in order to generate an error.
0x03 (Vel. following error actual value): This subindex provides the actual value of the following error, which is the difference between the velocity demand and actual velocity (error = demand – actual).
- 0x04 (Vel. following error option code): It allow to select the desired response when the drive faces a velocity following error event.
- 0 → The drive will enter in fault state after velocity following error is detected.
- 1 → The drive will continue operating after velocity following error is detected. In addition, following error will be signalized in statusword.
- 0x05 (Pos. following error option code): It allow to select the desired response when the drive faces a position following error event.
- 0 → The drive will enter in fault state after position following error is detected.
- 1 → The drive will continue operating after position following error is detected. In addition, following error will be signalized in statusword.