Digital Halls
Digital halls are transducers that provide an electrical signal at its output proportional to the relative position of the shaft of a rotor to a predetermined reference. They are based on the Hall effect, and the output signal that they provide is discretized: in fact, very often they only provide a bit indicating presence or absence of magnetic field, being then also known as switches. EMCL allows controlling digital halls in all of their common configurations.
Dig. halls as position feedback
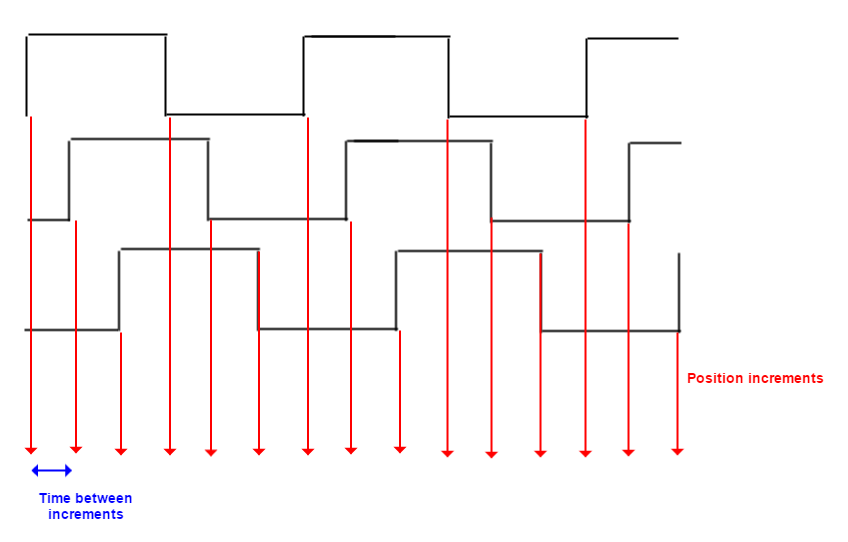
The digital halls are able to measure position based on the transitions of the halls value.
The number of counts per mechanical revolution are:
Dig. halls as velocity feedback
Velocity is obtained by measuring the time between two halls transitions (see picture above). This strategy offers and excellent accuracy at low speeds.
This algorithm includes a compensation of the positioning error of the halls in the motor during the assembly.
Estimation from position feedback is also available to measure the velocity using digital halls (as position sensor). The most appropriate method depends on the application itself, but it is always recommended to use the digital halls as velocity feedback as first option.
The update rate of the velocity actual value is equal to the time between two transitions. It means that at very low speeds the update rate could be too slow for the controller to get a proper stable speed.
Dig. halls as commutation feedback
Digital halls transitions are directly linked to the actuator phases position, so this feedback is suitable as commutation feedback. However due to its low resolution, the excitation required to drive the actuator is trapezoidal (see motor types) independently of the back-EMF waveform of this last. If sinusoidal exicitations are required, see the next chapter.
Dig. halls as reference feedback
If the system has a feedback with higher resolution (like a quadrature incremental encoder) but incremental (without an absolute reference of the rotor phases position), the digitals halls could be used as reference to align the high resolution sensor with the phases. This allows use sinusoidal excitation techniques without needing a initial phasing process of the high resolution feedback each time the system is powered up.