Commutation
This view allows configuration of basic commutation settings. Commutation is the process of switching current in the phases in order to generate motion. The available settings will depend on the type of motor and feedback in use.
Commutation sensor
The Commutation sensor allows for selecting which sensor is used to measure the electrical angle of the rotor. Next to the sensor a link to its configuration view will be displayed. If the selected sensor is an incremental sensor or it is not aligned with the rotor it will not be able to give the correct value without an initial rotor angle determination method.
Initial angle determination method
The initial angle determination method determines which method to use in order to localize the position of the rotor. Several methods are available.
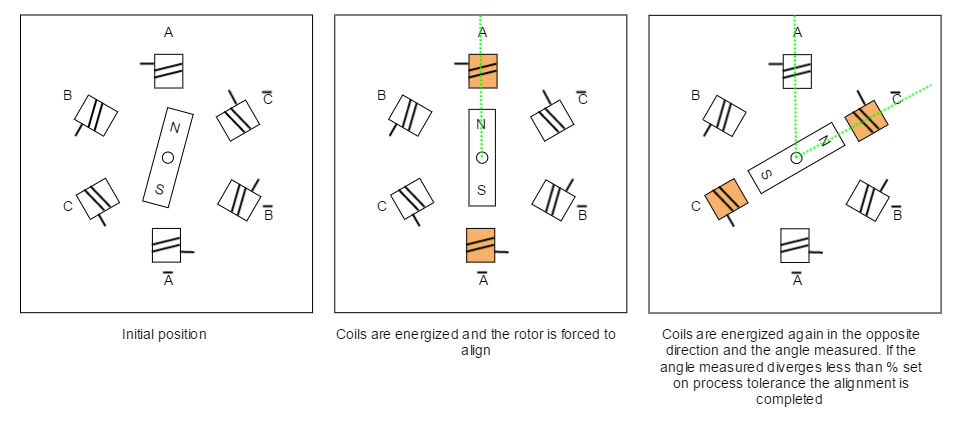
Forced alignment method
This method forces the rotor to align in the direction of two different phases and check if the angular increment measured using commutation sensor match the expected one. If this condition is not satisfied the process is repeated changing the used phases until it completes all possibilities.
This method is useful when using incremental sensors for commutation (ex: quadrature digital encoder, SinCos encoder, Analog input or PWM input)
When the force alignment method is selected the following parameters needs to be provided:
| Parameter | Description |
|---|---|
| Process time | This parameter determines the duration in milliseconds of the whole process (alignment between two phases). If the process is repeated it will use this time for each repetition. |
| Process current | This parameter determines the current used by the process in mA. |
| Process tolerance | This parameter determines the maximum tolerated error in process around the expected displacement. The value is expressed as a percentage of the expected displacement. |
Initial rotor position known
This method is used when the initial rotor position is known each time the system is powered up or reconfigured. When selected, the user needs to provide the initial rotor angle. The actual system angle parameter could be used to determine that value.
Non incremental sensor used
This method directly use the information coming from the sensor specified in the Reference sensor parameter.
The reference sensor might require an initial calibration to align with the actuator phases the first time is configured.