Open loop vector mode
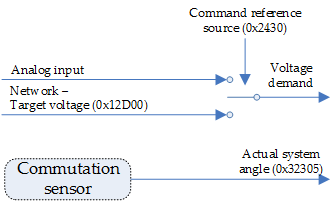
When EMCL works in open loop vector mode, the motor is excited through direct voltage application, without taking into account sensor feedback. Whenever applicable (brushless AC, brushless DC or AC induction motors), the commutation frequency is also controlled. The following figure depicts a schematic of the open loop processing:
When using brushless motors, this mode uses commutation sensors to determine the position of the rotor, therefore achieving maximum electric-energy-to-torque ratio. Nevertheless, notice that this does not mean that any control loop is closed: the commutation sensors are used exclusively to switch between the phases being injected current and the phases that drag the return current.
Notice the difference between open loop vector and open loop scalar modes. Open loop scalar mode establishes a predetermined commutation frequency and generates current accordingly. Instead, in open loop vector, commutation sensors are used to determine the position of the rotor. As a direct consequence, when using DC motors, open loop vector mode and open loop scalar mode are exactly the same.
Open loop vector mode does not work with AC induction motors.
Controlword in open loop vector mode
The open loop vector mode uses no mode specific bit of the controlword. The target voltage will be automatically processed after reception.
Statusword in open loop vector mode
The open loop vector mode uses no mode specific bit of the statusword.