Analog Input Command Source
An analog signal can be used as a command source for a motion application, for instance the analog output of a current probe, or the analog output of an external tachometer.
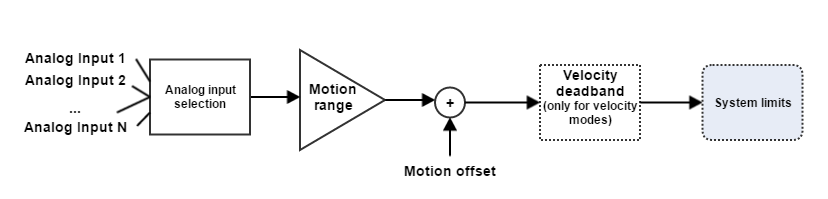
For this signal to be useful to the control system, it is discretized, and linearly modified if required (scaling and offset), and the result of this operations is delivered to the control system. The control system ensures that system limits are not exceeded, and afterwards it stores this value in the required object.
In addition to those features, and only for velocity modes, a deadband is provided to prevent overcontrol near to the target velocity due to an excess of sensitivity.
EMCL offers the option to use an analog signal as a command source for the next modes of operation:
- Open loop vector
- Open loop scalar
- Profile position
- Velocity mode
- Profile velocity
- Profile torque
- Cyclic synchronous position
- Cyclic synchronous velocity
- Cyclic synchronous torque
The register 0x2434 - Analog input command source is used to configure the parameters of analog input.
- Analog input used: controls which of the general purpose analog input is used as analog command source. Valid values range from 1 to the maximum number of analog inputs available.
- Analog input motion range: contains the input range in motion units. This value operates prior to taking into account system limits.
- Analog input motion offset: adds a value in motion units to the discretized analog input. This can be used to correct the presence of offsets in the analog signal, generate asymmetric motion ranges and determine the 0 value.
Analog input velocity deadband: when the system is working in a velocity control mode, this feature allows to define a range of values around the motion offset inside which the input is considered to be zero if the value is strictly inferior to the margins of this range. This characteristic allows to reduce sensitivity at low speeds, and it is defined in counts/s.
This feature is only used in velocity mode.
Usage examples
Case 1
| Desired configuration | Result | |
|---|---|---|
| Mode of operation | Cyclic synchronous position | 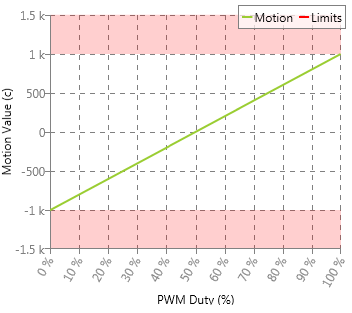 |
| Motion range | 2000 counts | |
| Motion offset | -1000 counts | |
| Position limits | ± 1000 | |
Case 2
| Desired configuration | Result | |
|---|---|---|
| Mode of operation | Profile velocity | 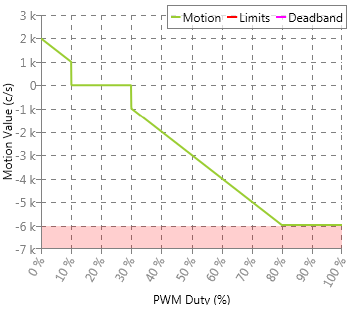 |
| Motion range | -10000 counts / 2 | |
| Motion offset | 2000 counts | |
| Velocity deadband | 1000 | |
| Velocity limit | ± 6000 | |