Profile torque mode
In profile torque mode, EMCL closes the control loop with a magnitude proportional to the applied torque, without consideration for the actual velocity or position of the system. The following diagram depicts how this mode works internally:
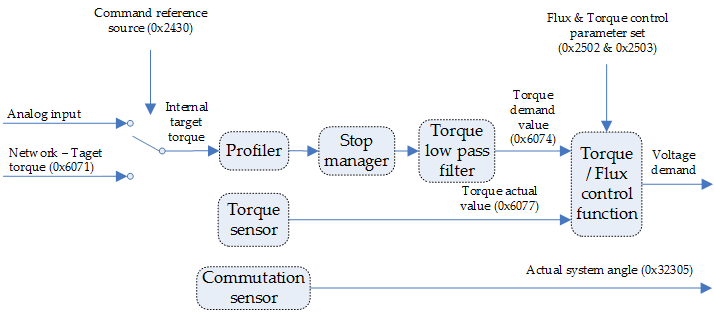
Target torque obtained from the command source is processed immediately on reception (system limits, etc.), and is delivered to the profiler afterwards. According to the predetermined parameters, the profiler generates and provides the control unit with the instantaneous target torque to be achieved. Upon reaching the target, a statusword is issued as a notification to other nodes.
Profile torque mode is not supported for AC induction motors.
Controlword in profile torque mode
The binary representation of the register value and its corresponding meaning is as follows:
Bit number: | 15 | … | 9 | 8 | 7 | 6 | 5 | 4 | 3 | … | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| - | Halt | - | Reserved | - | - | - | ||||
The action taken is described below, depending on the value of each bit:
Name | Value | Description |
|---|---|---|
Halt
| 0 | The profile torque movement must be executed. |
1 | Axis must be stopped. |
Statusword in profile torque mode
The binary representation of the register value and its corresponding meaning is as follows:
Bit number: | 15 | 14 | 13 | 12 | 11 | 10 | 9 | … | 0 |
|---|---|---|---|---|---|---|---|---|---|
| - | - | - | - | Target reached | - | |||
The meaning of each bit is described below, depending on its value:
Name | Value | Description |
|---|---|---|
Target reached
| 0 | Halt = 0: Target torque not reached |
1 | Halt = 0: Target torque reached |
Related objects
0x2502 - Flux control parameters set