Position control
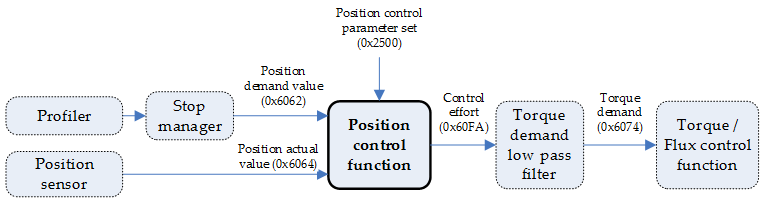
The position control function is in charge of closing the position loop, or in other words, it ensures that the controller is all the time in either in the position demanded by the profiler or going to that position, according to the predefined profiler parameters. This loop uses the output of the profiler, after passing through the stop manager, and the actual position reading, as an input for the algorithm. In order to increase control frequency resolution, the output of the loop is scaled to torque values, and the torque control function is used afterwards to provide the actual control of the actuator. See the torque control page for additional information about how the torque control loop works and why the position and velocity control loops are actually closed using the torque control function.
Related objects
0x2500 - Position control parameters set
0x6062 - Position demand value