Torque control
The torque control function is in charge of closing the torque loop, or in other words, it ensures that the controller is generating the torque demanded by operation modes at all times. When working in profiled torque mode, this loop uses the output of the profiler directly after passing through the stop manager. In addition, since the torque control loop is the loop with better frequency resolution (10KHz vs 1KHz for the other loops), it is also used by the position and velocity control loops. Those loops generate a torque demand value according to the target magnitude and profiler requirements, and along with the torque actual value, those inputs are used to control the torque loop, which provides an indirect control of the position and velocity control loops. The loop behavior strongly depends on its configuration, which can be modified through the corresponding registers.
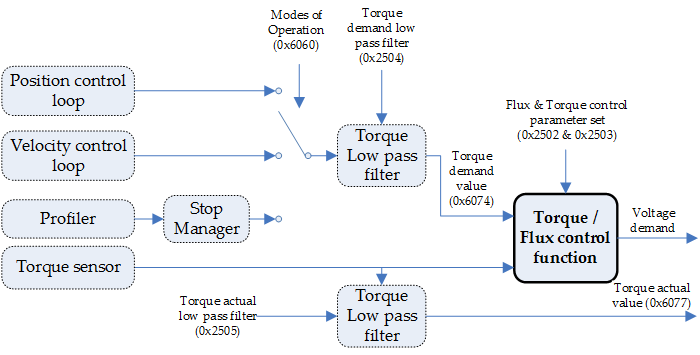
In BLAC motors this control works in rotational d-q frame (direct & quadrature), where the direct component represents the desired flux, and the quadrature component the torque. The system continually tries to correct the system motion for the flux to be zero, for maximum electric-energy-to-torque transfer ratio.
The torque control function has an internal asymmetrical limit control that can be used to limit max torque in both directions of movement.
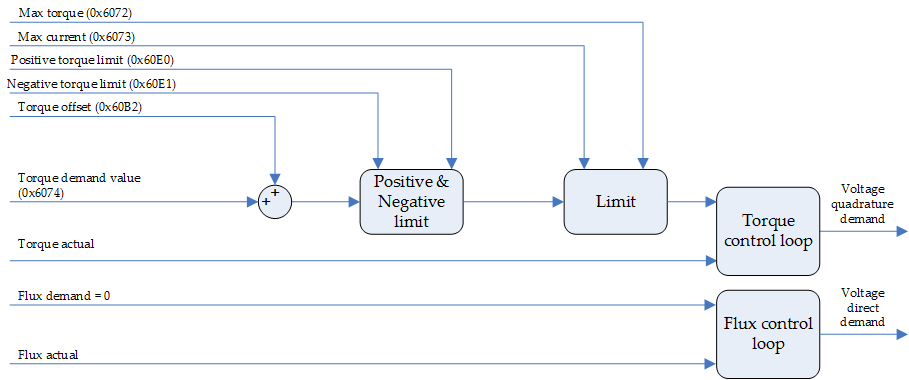
In DC or BLAC motors only the quadrature loop is used.
Related objects
0x2502 - Flux control parameters set
0x2503 - Torque control parameters set
0x2504 - Torque demand low pass filter
0x2505 - Torque actual low pass filter
0x60E0 - Positive torque limit value