Motor
A motor or engine is the device designed to convert from one form of energy, in this case electrical energy, to mechanical energy. Is at the core of the subsystem of actuators, being the only indispensable component. Adequate identification and parameterization of the motor characteristics is essential for achieving the desired motion features, and EMCL allows a high level of customization of motor features to achieve the highest levels of motor performance.
Motor types
EMCL is able to control a wide range of different motors. They are listed below:
- Squirrel cage induction motor - (velocity mode only)
- Stepper with microstepping capability
- Rotary brushless AC (sinusoidal back-EMF) - (use sinusoidal currents)
- Rotary brushless DC (trapezoidal back-EMF) - (use trapezoidal currents)
- Rotary DC motor
- Rotary voice coil
- Linear brushless AC (sinusoidal back-EMF) - (use sinusoidal currents)
- Linear brushless DC (trapezoidal back-EMF) - (use trapezoidal currents)
- Linear voice coil
- Linear DC motor
Motor type configuration can be achieved through the Motor type register.
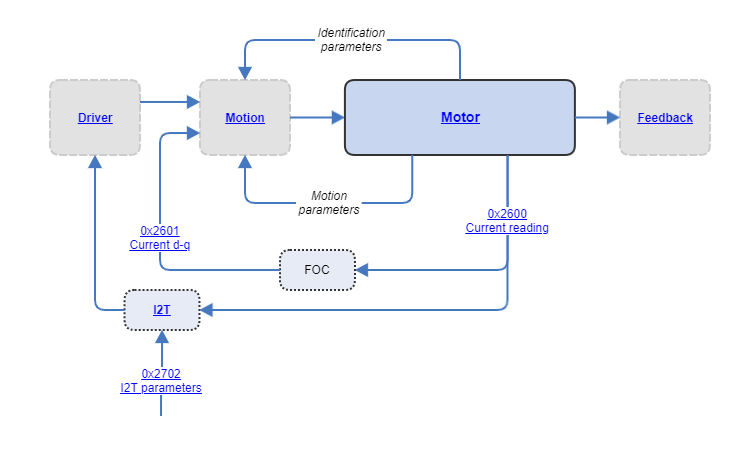
Identification parameters
- Motor pair poles
- Stepper parameters
- Motor parameters
- Gear ratio
- Motor type
- Feed constant
Motion parameters
- i2t parameters
- Motor rated current
- Motor rated torque
- Max motor speed