System limits
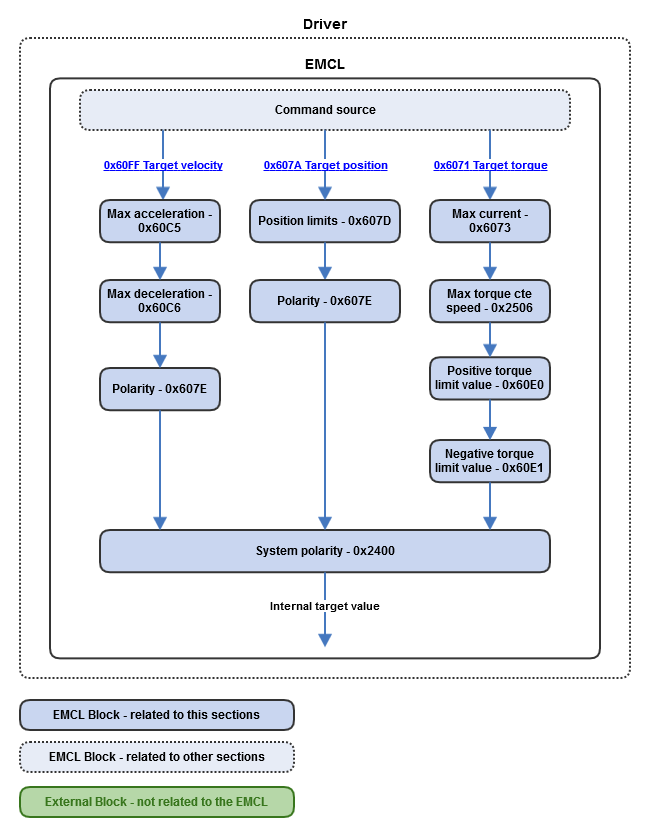
System limits prevent values for the target magnitude exceeding the allowed range to be even considered by the subsequent subsystems. They form a first line of defense of the motion controller and the actuator against target values that, to be reached, could potentially damage the drive or the actuator. Those values are inserted by the user during system configuration and define the range of operation of the motion controller.
You may click on any box on the diagram below to learn more about each of the registers related to system limits.
Related objects
0x607D - Software position limit
0x60E0 - Positive torque limit value